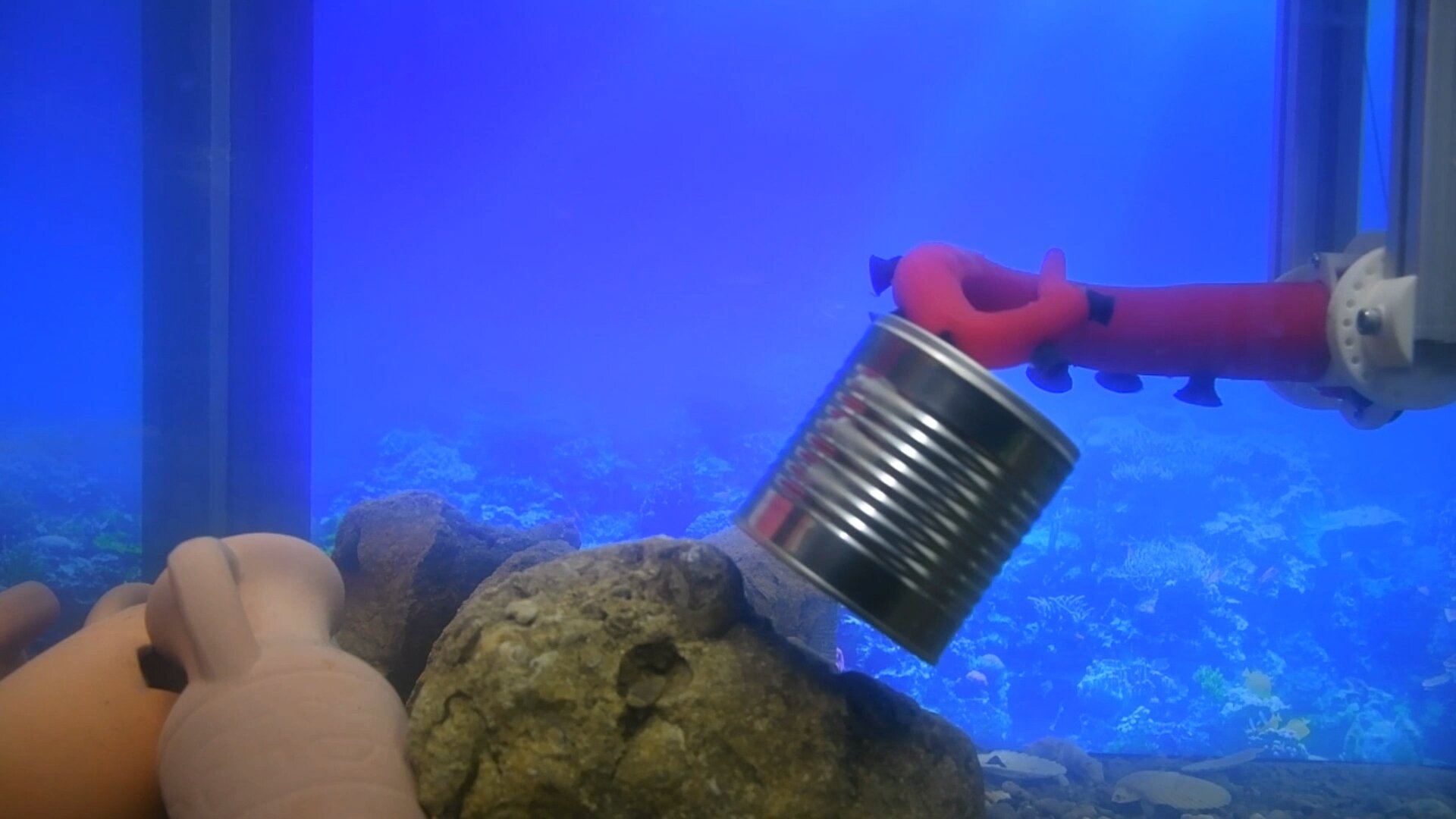
E’ in grado di afferrare un oggetto fragile sul fondo del mare senza romperlo, senza vederlo, guidato solo dal tatto. E’ il prototipo sviluppato dall’Istituto Italiano di Tecnologia (IIT) di Genova, pubblicato su Nature Machine Intelligence, che si ispira a uno degli animali più intelligenti, il polpo, per rivoluzionare il modo in cui un robot interagisce con la realtà circostante.
Il polpo, maestro della manipolazione
Perché prendere spunto proprio da questo animale? Con le sue otto braccia dotate di ventose sensibili e di un sistema nervoso distribuito, spiegano gli autori del prototipo, il polpo è un maestro della manipolazione: gran parte dell’elaborazione delle informazioni, infatti, avviene direttamente negli arti, senza passare per il cervello. È questa strategia biologica che il gruppo di Barbara Mazzolai, responsabile del laboratorio Bioinspired Soft Robotics e Associate Director dell’IIT per la Robotica, ha tradotto in un’architettura robotica funzionante.
Silicone e sensori ottici
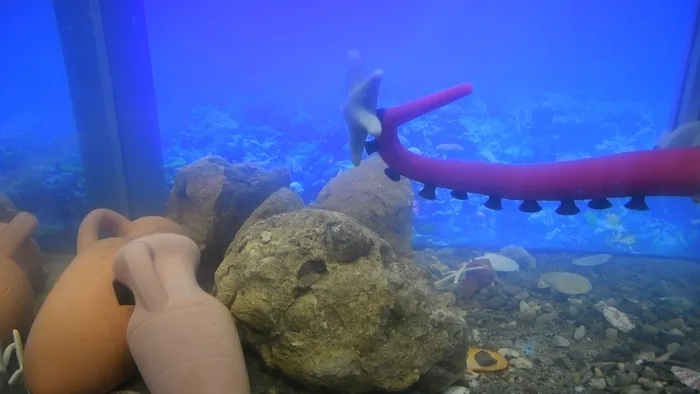
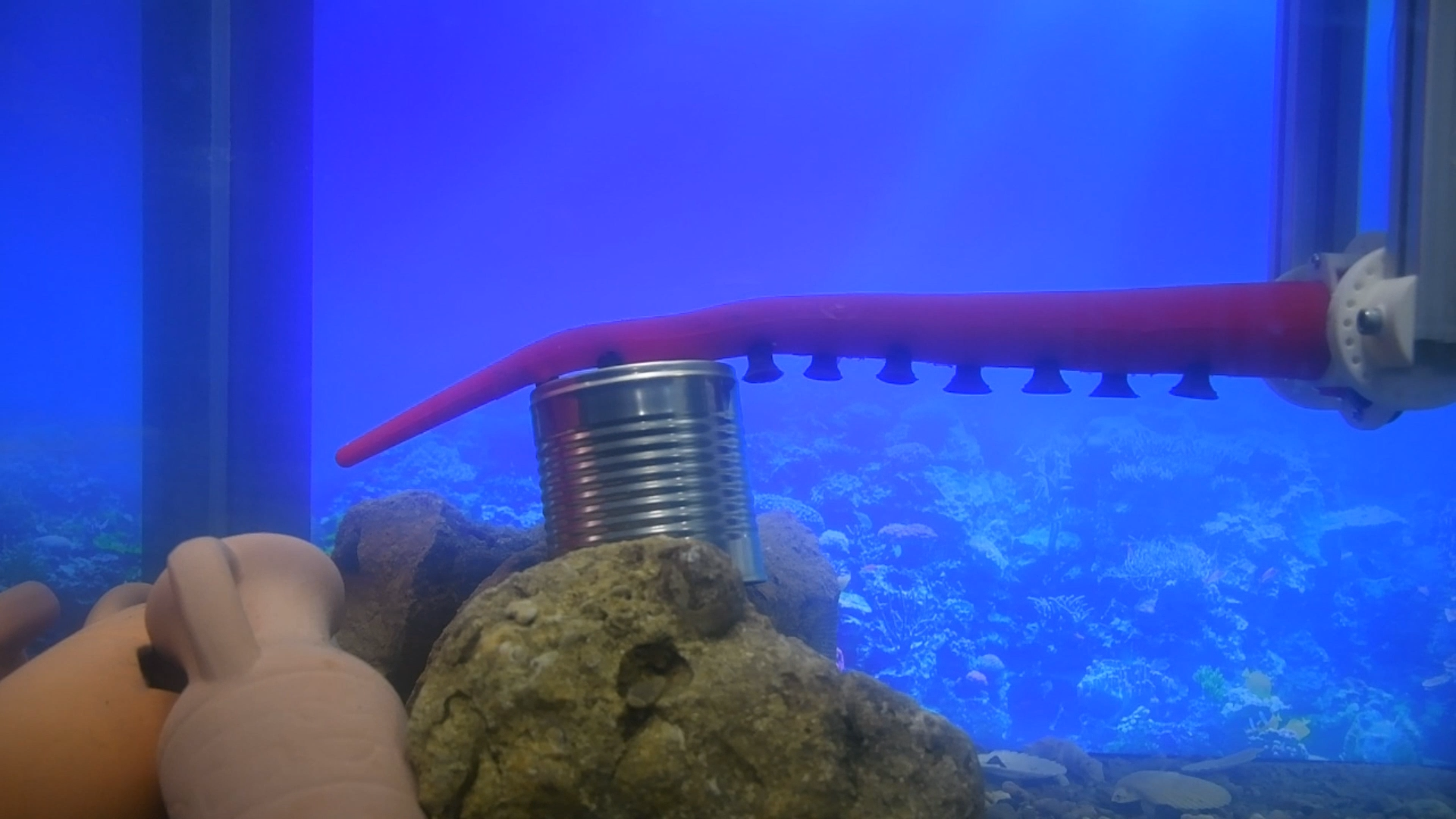
Il braccio morbido sviluppato dal laboratorio di Bioinspired Soft Robotics è realizzato in silicone e dotato di ventose artificiali che incorporano minuscoli sensori ottici. Quando una ventosa entra in contatto con un oggetto, la deformazione della struttura altera la riflessione della luce emessa da LED interni: il sistema può così stimare intensità e direzione della forza applicata. Le informazioni vengono elaborate localmente, coordinando sia le singole ventose, che attivano istantaneamente il processo di adesione, sia i movimenti complessivi del braccio: flessione, torsione, avvolgimento. Il risultato è una presa adattiva, autonoma, che funziona sia in aria che sott’acqua.