Il team Poliba del “RoboPhysics Laboratory”, ha vinto il primo premio in Giappone alla “RoboSoft Grasping Competition 2026”. La competizione si è svolta dall’8 al 9 aprile 2026 a Kanazawa, capitale culturale sulla costa occidentale del Giappone, durante la Conferenza Internazionale IEEE sulla Robotica Soft (IEEE RoboSoft 2026). La competizione ha visto la partecipazione di diversi team internazionali dediti alla robotica. Tra questi, oltre al Poliba, le agguerrite squadre dell’università JAIST (Japan Advanced Institute of Science and Technology), della Southern University of Science and Technology (Shenzhen, Cina), e dell’Università Tecnológico de Monterrey (Messico).
Il progetto
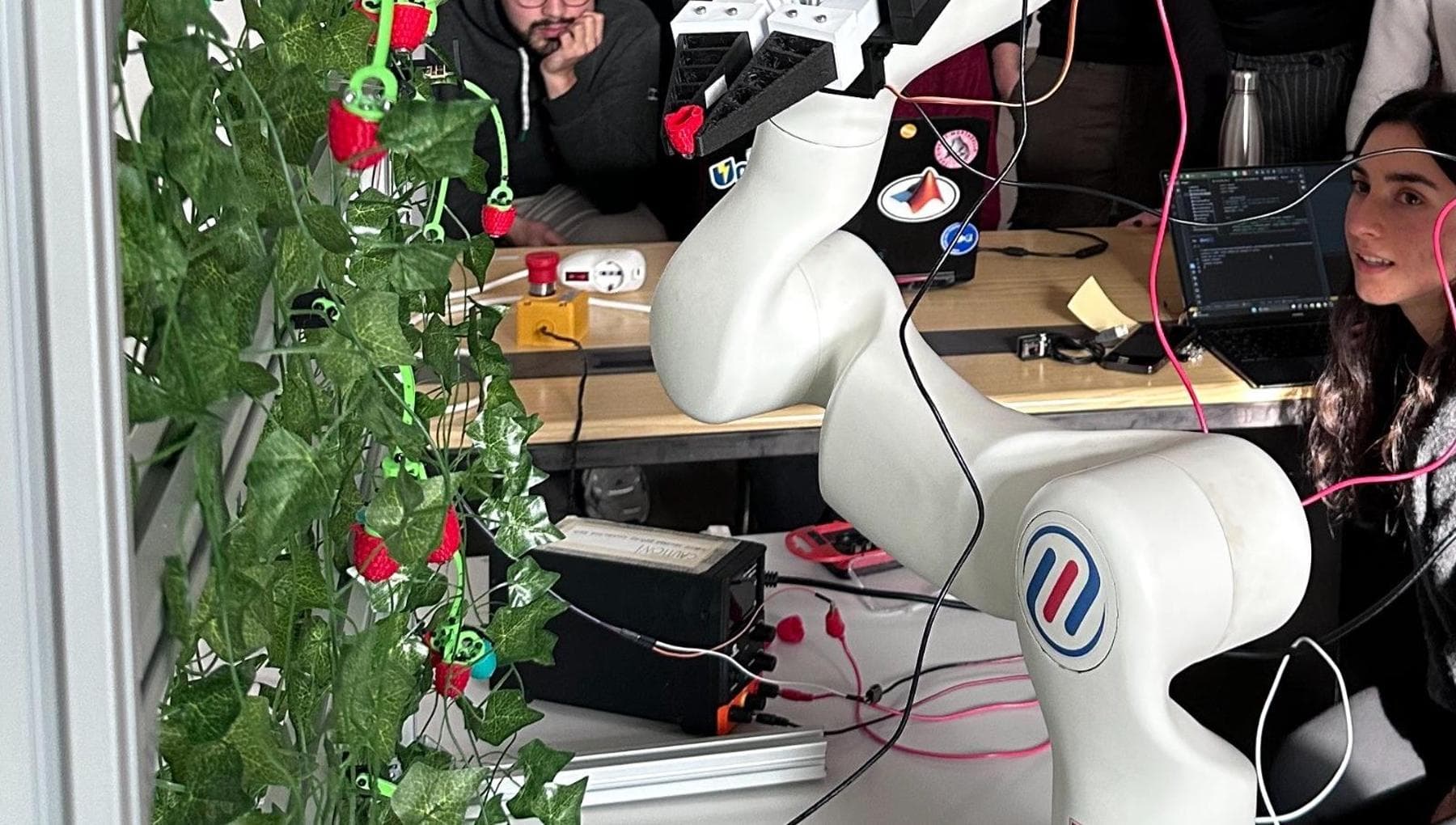
La sfida ha richiesto la progettazione ad hoc di un gripper robotico (pinza speciale), capace di raccogliere lamponi artificiali con caratteristiche di morbidezza e fragilità dei lamponi reali, attraverso il controllo e dosaggio della giusta forza necessaria per il distacco del frutto dalla pianta e il deposito ordinato in un cestino senza danneggiarlo.
Gli studenti vincitori
Frutto del programma d’anno del percorso di studio del corso di “Mechatronics”, proseguito come attività di tesi (docente della materia, prof. Vito Cacucciolo), tre studenti Poliba del corso di laurea magistrale in “Mechanical Engineering”. Ciò ha consentito la composizione del team Poliba così formato: Elisabetta Annese e Luca Mitaritonna di Molfetta (Ba), Giuseppe Macchia di Palo del Colle (Ba), studenti; ing. Angelo Catalano, coordinatore-tutor, dottorando presso il RoboPhysics Laboratory, prof. Vito Cacucciolo, supervisore, responsabile scientifico del Laboratorio Poliba di robotica.