Getting a robot from point A to point B sounds simple. The hard part is that a robot has no built-in sense of where it is.
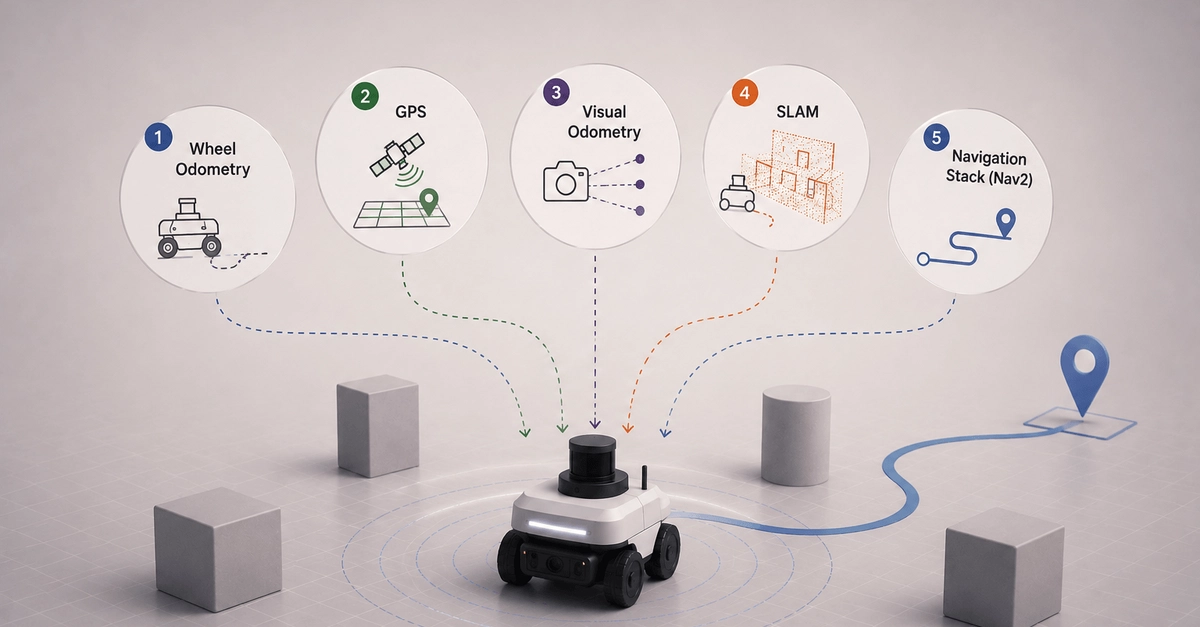
Understanding how robots navigate comes down to two questions: where am I, and how do I get to my goal? Here are the five most common methods robots use to answer them.
Why navigation is hard for robots
A person walks into a room and instantly knows roughly where they are. A robot starts with none of that. It only has sensor readings, and it has to turn those raw numbers into an estimate of its own position, a model of its surroundings, and a plan to move. Below are the five most common ways robots navigate. Each tackles part of that problem, and each comes with its own trade-off.
1. Wheel odometry: estimating distance from wheel rotation