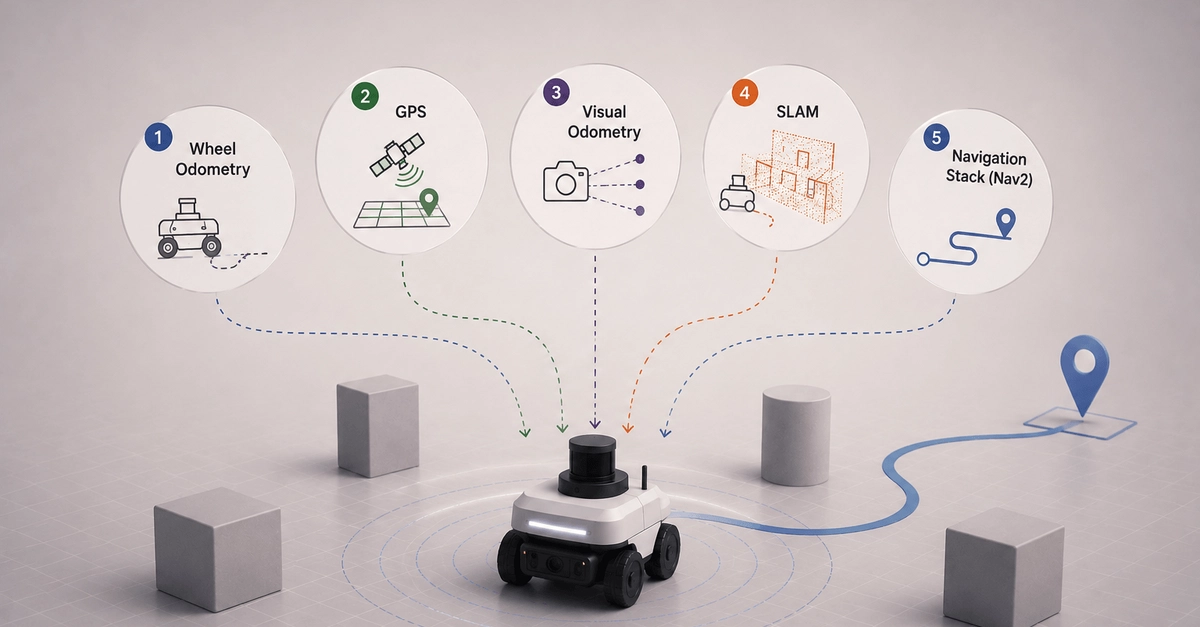
With rapid advances in robotics, autonomous navigation has become essential for mobile robots. The ROS Navigation Stack is the de facto open-source framework for building reliable, real-world navigation systems. It integrates perception, mapping, localization, path planning, and motion control into a unified pipeline.
This article breaks down the core components, working principles, configuration best practices, and common pitfalls of the ROS Navigation Stack to help engineers build stable autonomous robots.
Overview
The ROS Navigation Stack is a collection of coordinated packages that enable a robot to:
Localize itself on a map