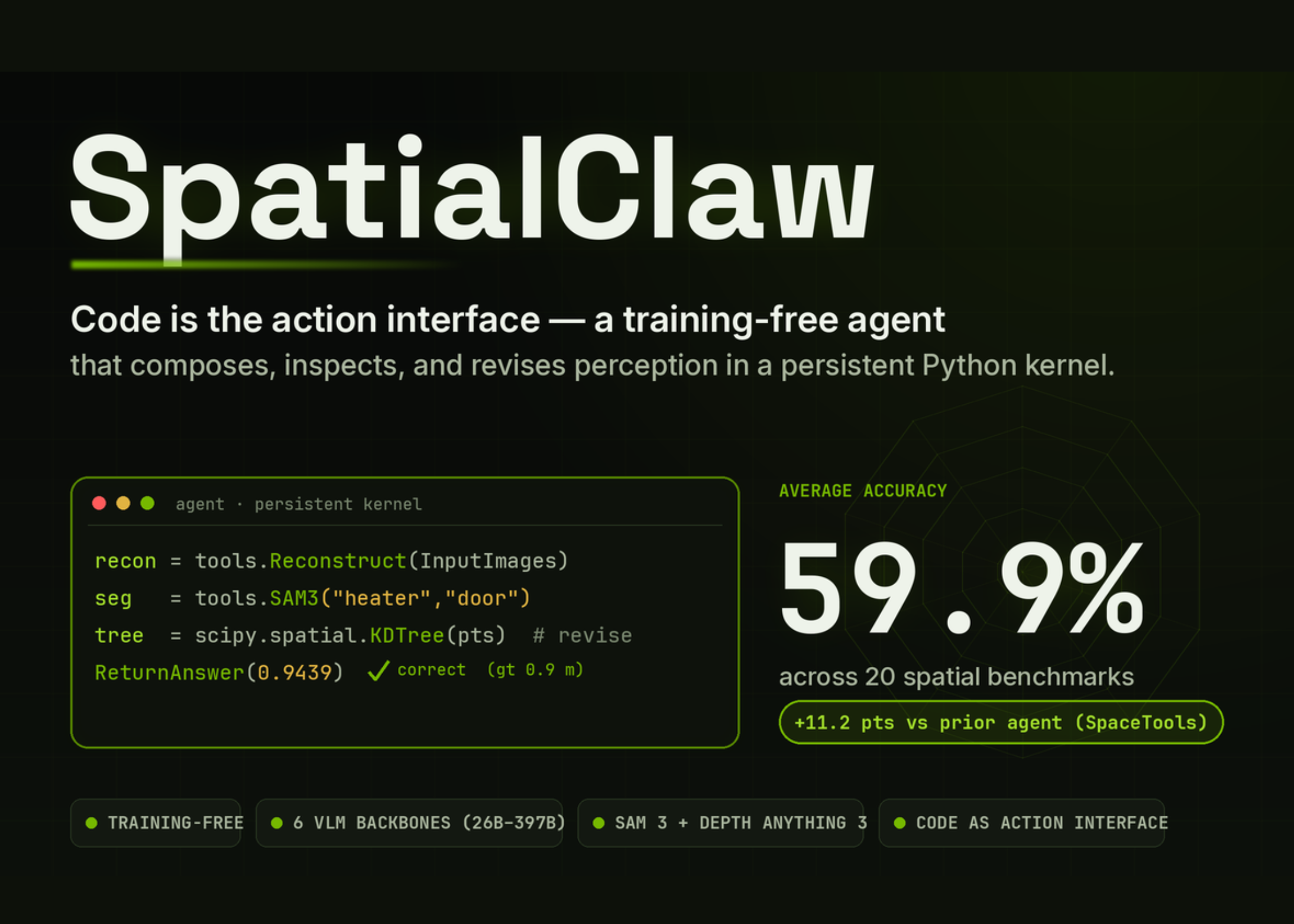
NVIDIA Research has released SpatialClaw, a training-free framework for spatial reasoning. It targets a persistent weakness in vision-language models (VLMs). These models still struggle to judge where objects are, how they relate, and how they move in 3D.
SpatialClaw does not retrain the model. Instead, it changes the action interface the agent uses to call perception tools. The research team argues the interface is the bottleneck. Their solution is to treat code as the action interface. Across 20 benchmarks, SpatialClaw reaches 59.9% average accuracy. It outperforms the recent spatial agent SpaceTools by 11.2 points.
What is SpatialClaw
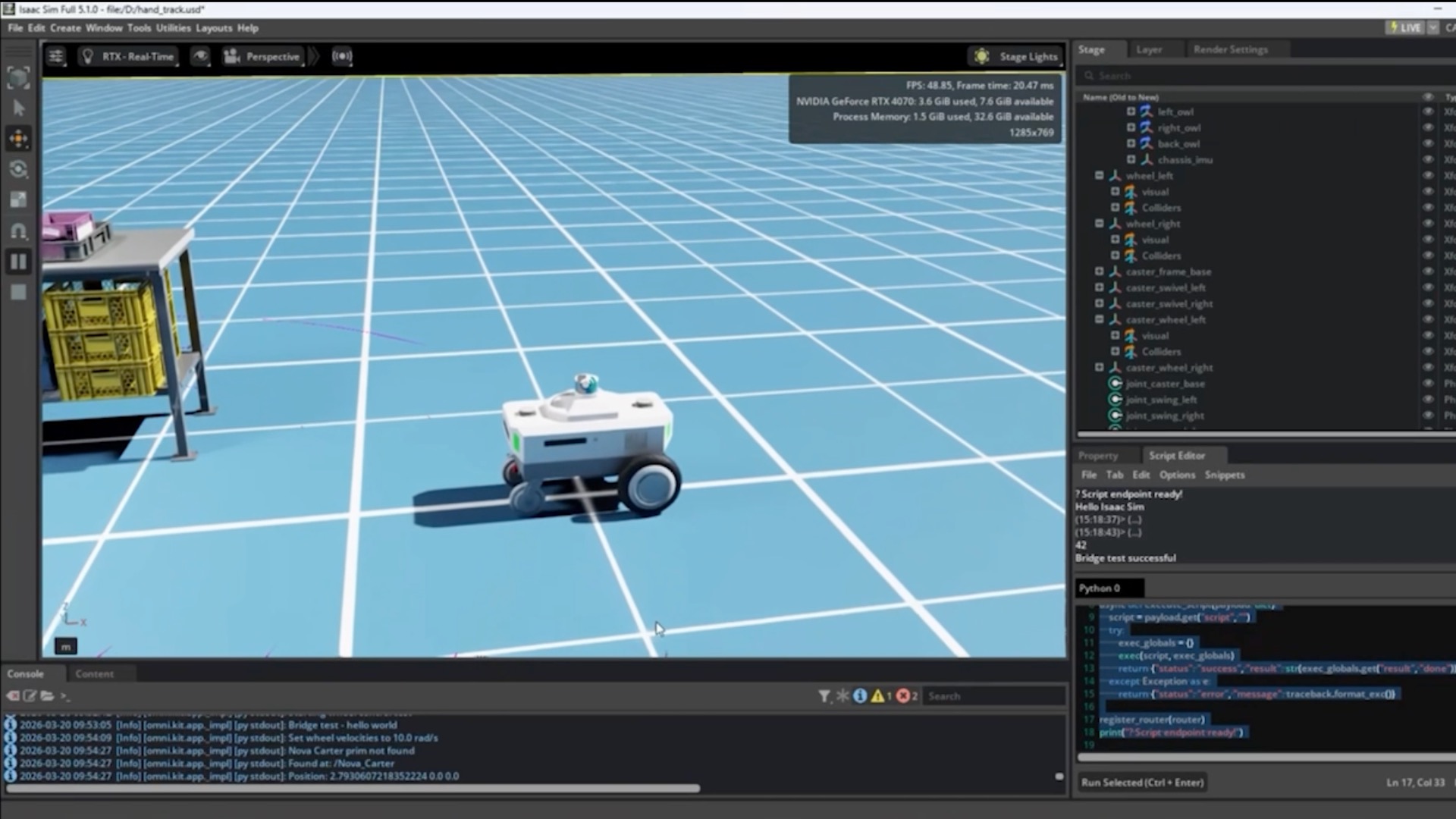
SpatialClaw is an agent loop wrapped around a stateful Python kernel. The kernel is pre-loaded with input frames and a set of primitives. Perception tools are plain Python callables. Their outputs, including masks, depth maps, camera geometry, and trajectories, are ordinary Python variables.
The kernel exposes six public entry points. InputImages holds the sampled frames. Metadata carries frame rate, duration, and frame indices. tools exposes perception and geometry primitives. show() embeds an image into the agent’s next context. vlm dispatches queries to a separate VLM session. ReturnAnswer() submits the final answer.