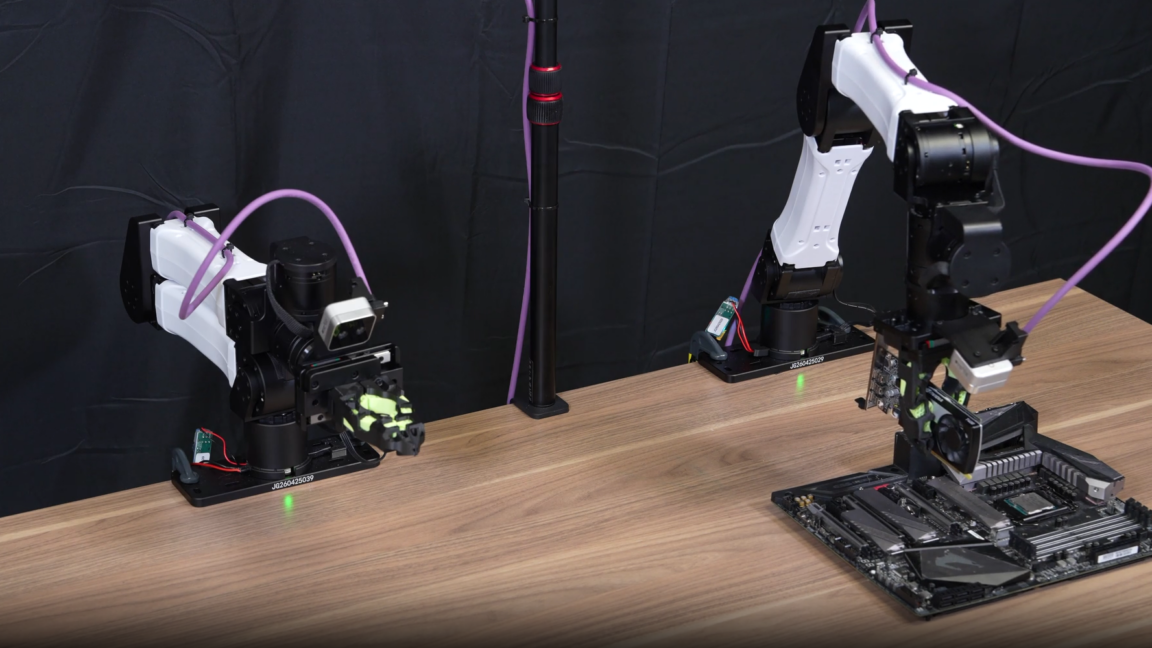
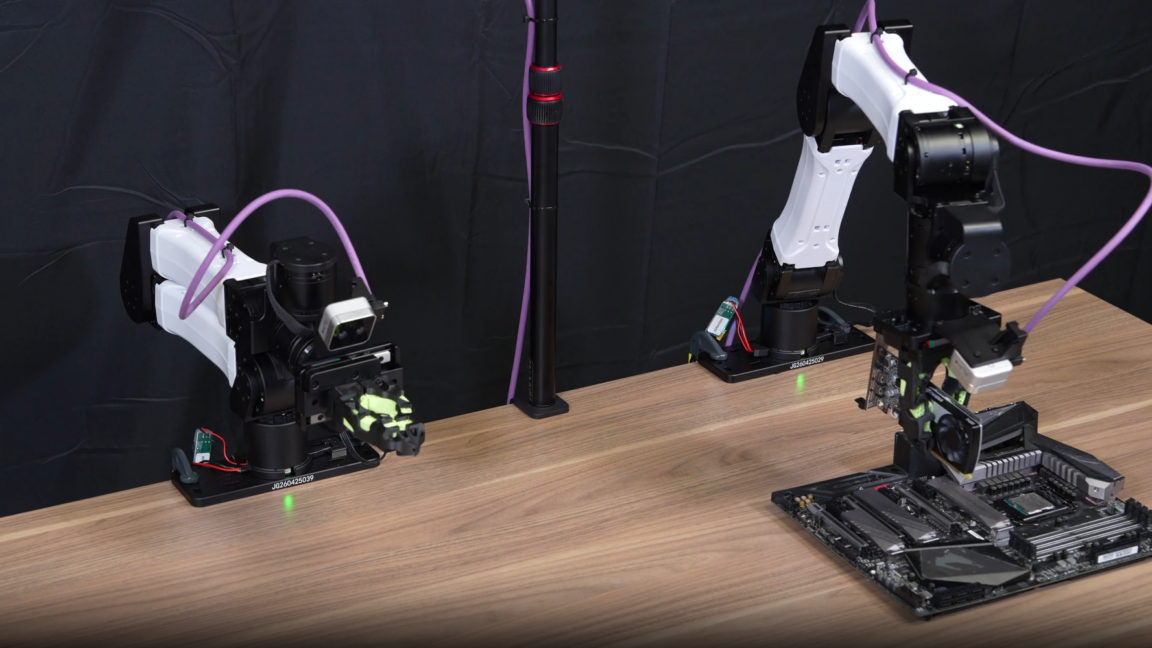
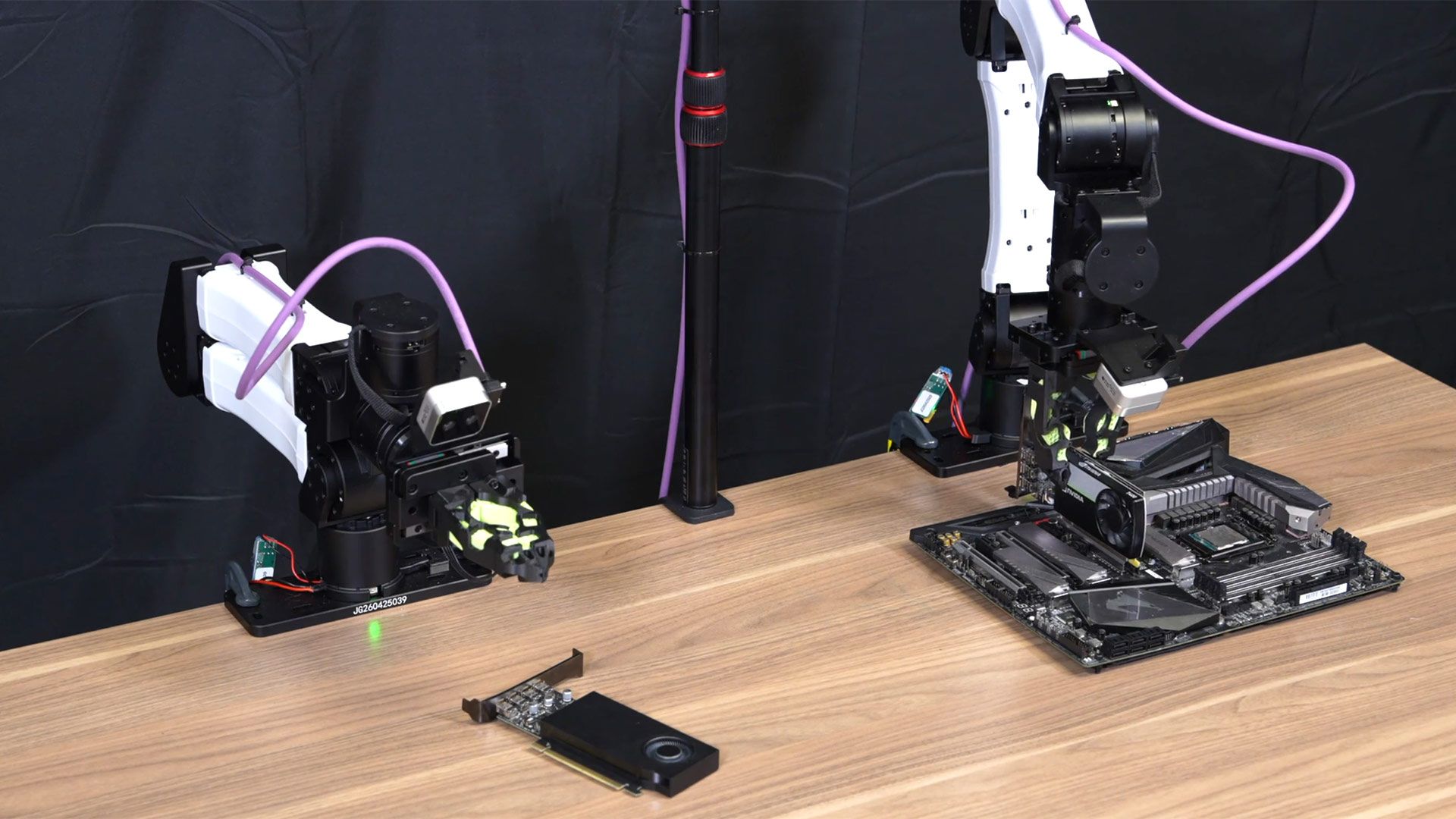
Researchers from Nvidia, Carnegie Mellon University, and UC Berkeley are using AI coding agents to teach robots dexterous grasping in the real world. A fleet of eight robots hits up to 99 percent success on tricky tasks.
Dexterous grasping and manipulation are still hard for robots to learn. Humans have to stay involved at every step: collecting training data, resetting the scene after each attempt, and tweaking algorithms. That manual overhead slows everything down. ENPIRE, a research project from Nvidia, Carnegie Mellon University, and UC Berkeley, aims to break through that bottleneck by handing the work to AI coding agents.
The core idea is a feedback loop running on real hardware: reset the workspace, run a strategy, check the result, and improve the next attempt.
The agent builds its own evaluation tools
ENPIRE runs in two phases. In the first, the agent sets up a working environment with some human feedback. That includes safety boundaries, an automatic reset, and automated success checking. Instead of having a human evaluate every attempt, the agent writes its own reward function to tell success from failure. It only needs a few minutes of example video showing successful and failed attempts.