Teaching a robot to pick up a coffee mug is surprisingly hard. Not because the physics are complex, but because getting enough quality training data has traditionally required either painstaking teleoperation sessions, expensive simulation environments, or an actual robot failing thousands of times. UC Berkeley researchers just proposed a workaround: let the robots learn by watching YouTube.
A team from the Berkeley Artificial Intelligence Research (BAIR) lab has built a pipeline that converts ordinary internet videos of human hands manipulating objects into usable 3D training data for robots. The paper, titled “Object-centric 3D Motion Field for Robot Learning from Human Videos,” was posted on June 4, 2025, by researchers Zhao-Heng Yin, Sherry Yang, and Pieter Abbeel.
From flat footage to 3D robot instructions
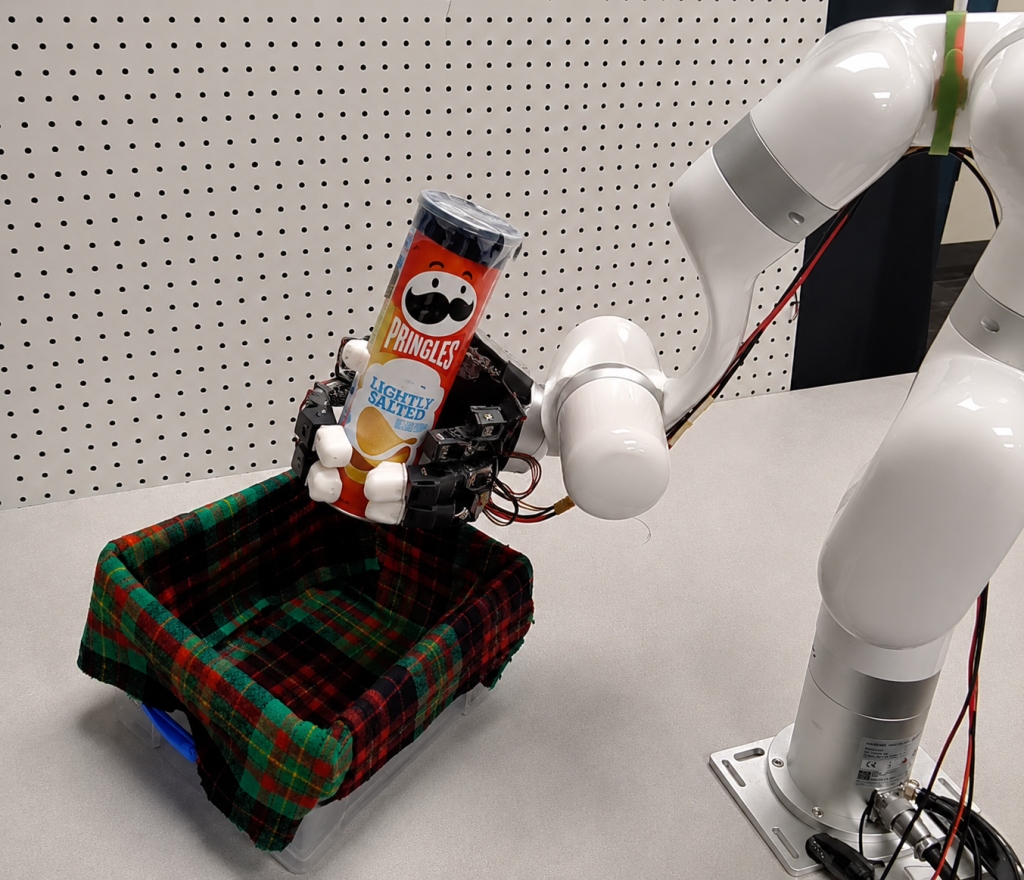
The pipeline bridges that gap by reconstructing 3D motion fields from 2D video footage. It watches a video of someone picking up a spatula and reverse-engineers the full spatial geometry of that interaction, centered on the object being manipulated.
The system then filters the reconstructed data for quality, discarding noisy or ambiguous samples. What remains is clean enough for a robot to use as a demonstration it can imitate. The robot never needs to have performed the task itself. It never needs a human operator guiding its arm through the motion.