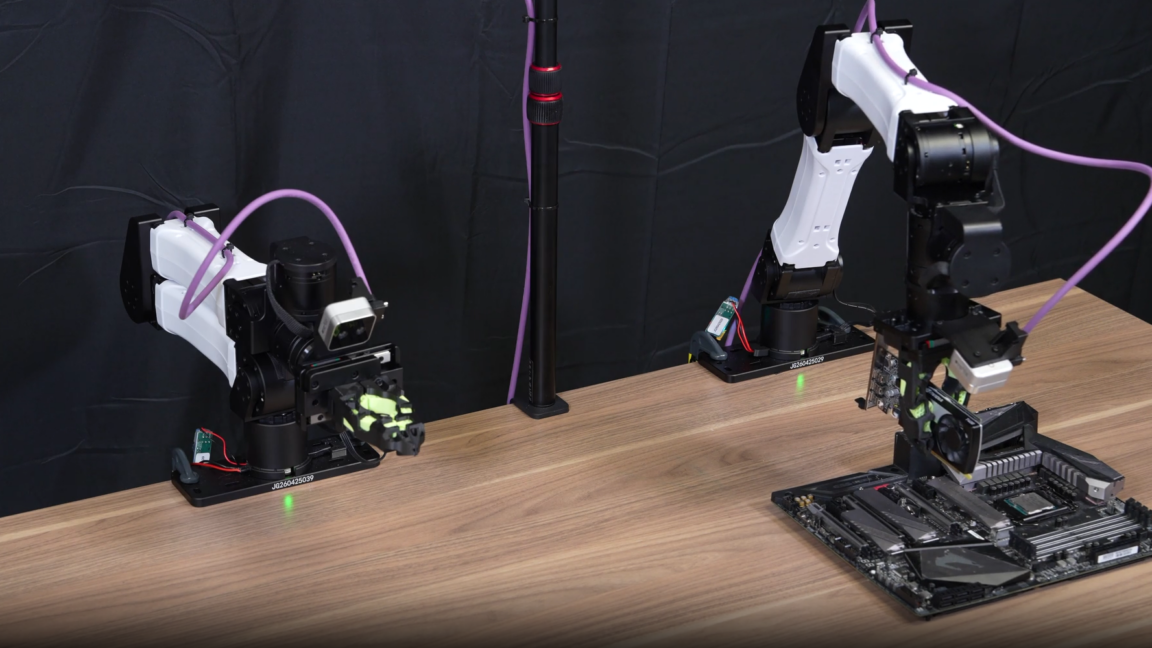
3d rendering humanoid robot working on laptop computergettyGenerative AI had the web waiting for it. Physical AI has to earn its training data in the real world, one slip or fall at a time, and that’s what keeps so many humanoids stuck in the lab.Watch enough humanoid robot demos and you start to notice the video edits. The robot handles laundry, and the clip ends before the messier second attempt. Another pours a drink, then the video moves on.What you never see is the take where the machine misses the handle, crushes the cup, or freezes because a box sat two inches off. Those moments aren't trimmed because they're embarrassing. They're trimmed because they're the problem. AI learned to write, summarize, and generate code before it learned to reliably pick up a mug. The bottleneck in physical AI isn't intelligence. It's experience.Generative AI had the webCompared with robots, language models had one enormous advantage: the web was already there. Trillions of words, sitting in plain sight, a corpus humanity spent decades writing without meaning to. Training a frontier model on it was hard and expensive, but the raw material existed before the first engineer showed up. Nobody had to manufacture it. They collected it and cleaned it. That single fact explains why language models scaled so quickly while robots are still fighting with mugs, shirts, shelves, and stairs.Physical AI has no internet of its ownThere's no web for hands. Nobody has captured, at internet scale, the sensorimotor mess of catching a slipping plate or steadying a leaning stack of boxes. The largest open effort to pool this kind of data, Open X-Embodiment, includes more than a million real robot trajectories across 22 robot embodiments and 527 skills. For robotics, that's a landmark. Compared with internet-scale text, it's tiny. And every one of those trajectories had to be physically performed by a real machine in a real lab.So they're building the corpus by handThe industry's answer is brute force. Companies run teleoperation farms where people strap into VR rigs and exoskeletons and pilot robots through the same dull tasks over and over, logging every motion as training data. Sit with that for a second. Humans are remote-controlling robots through thousands of repetitions so that, eventually, the robots won't need humans.Simulation is the other half, and it's a real help. NVIDIA and others let a robot practice a task millions of times overnight, free from bent grippers and dropped inventory. But simulated friction is an approximation of the real thing. Deformable objects, cluttered shelves, bad lighting, a torn label, a dented carton: that ordinary mess is where simulators still struggle. You can train a robot to be flawless in a world that's a little too clean. Physics collects the difference on the floor.Here's what I've seen in these deployments that the highlight reels leave out: the long tail is where robots break. A machine can look nearly flawless across a demo and still fail on the boring edge case that stops a live warehouse line.What to ask instead of watching the demoSo change the buying question. It isn't whether the demo looked good. Every demo looks good now. Ask how many real-world hours of task data sit behind the system, and how it performs on the messy edge cases rather than the staged ones. Ask how often a human steps in, and how much of that smooth performance depends on teleoperation, a scripted reset, or a controlled environment built to flatter the robot.That distinction matters because executives tend to evaluate robots the way they evaluate software. They ask whether the model is getting smarter. The better question is whether the system has seen enough of the real environment to survive it. A warehouse, hospital, kitchen, or factory isn't a benchmark. It's a pile of exceptions pretending to be a workflow.None of this means the humanoids won’t come. It means the timeline runs less on press releases and more on dull, repetitive data collection, slow and physical and expensive in a way scraping the web never was. Dollars raised tell you what investors hope will happen. Data hours tell you what the robot has actually lived through. Language got solved by reading. Movement has to be earned one slip or fall at a time.
Robots Don’t Read The Internet
Generative AI had the web to train on. Physical AI has to earn its data in the real world, one grasp, slip, and failure at a time.
TL;DRAI
Physical AI robots require human teleoperation for training, unlike generative AI's internet source. Open X-Embodiment: 1M+ trajectories vs. trillions of words. Focus robot purchasing on real data hours and edge cases, not demos. Timeline is data-bound, not compute-bound.
711 words~3 min read