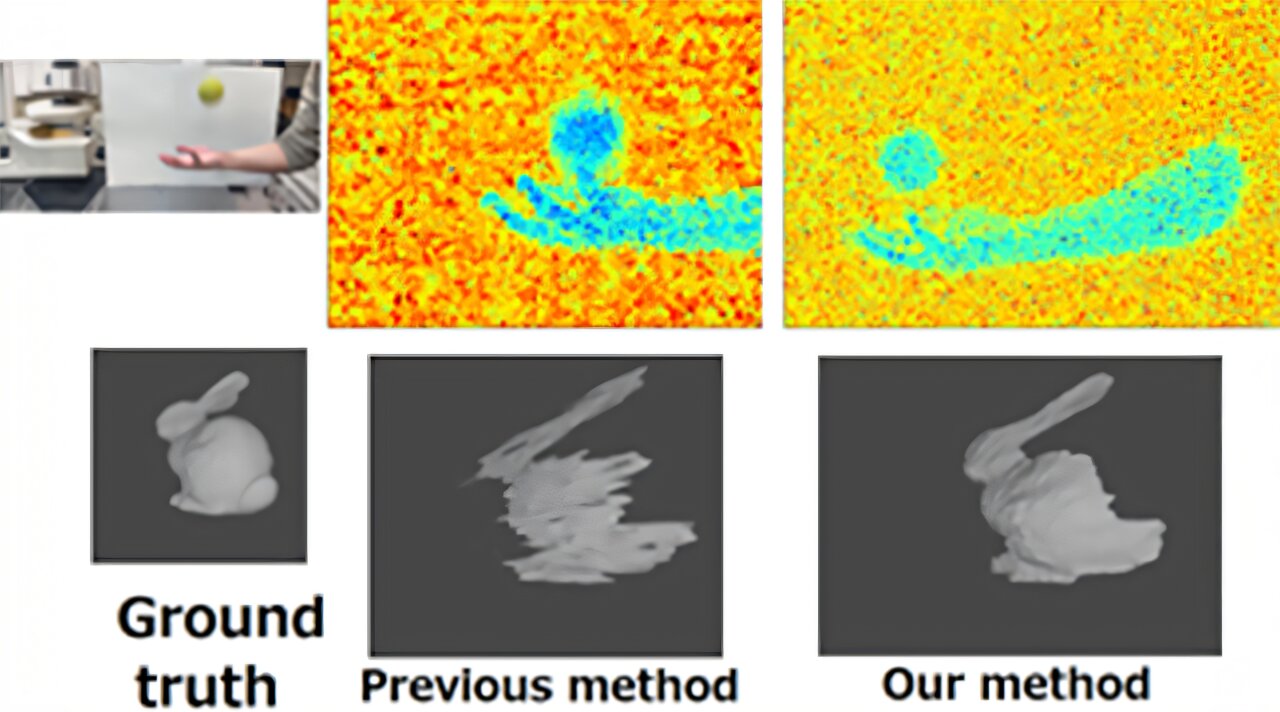
Improve depth precision in Indirect Time-of-Flight (I-ToF) cameras Upper Row: Measurement of a scene where a ball is being thrown. While the ball's outline is blurred in the conventional method, it remains sharp in the proposed method. Lower Row: Simulation results. When ambient noise is added under the same conditions, the proposed method shows significantly less impact. Credit: Kyushu University
Researchers from Kyushu University and DENSO IT Laboratory, Inc. have developed a new method to improve the accuracy of indirect Time-of-Flight (I-ToF) cameras. The technology considers the practical limitations of real-world sensors during the design process.
A patent application was filed on May 19, and the research will be presented this June at the IEEE/CVF Conference on Computer Vision and Pattern Recognition in Colorado, the United States.
I-ToF cameras are widely used in 3D sensing systems, including smartphone facial recognition, robotic obstacle avoidance, and automotive driver-monitoring applications. Depth information enables these systems to measure distances and perform precise spatial analysis.
The depth accuracy of an I-ToF camera strongly depends on the modulation functions of the laser and the demodulation functions of the sensor, specifically the coding scheme. However, most existing design methods assume perfect, noise-free sensors operating under theoretical conditions, presenting challenges for deployment on commercial devices.