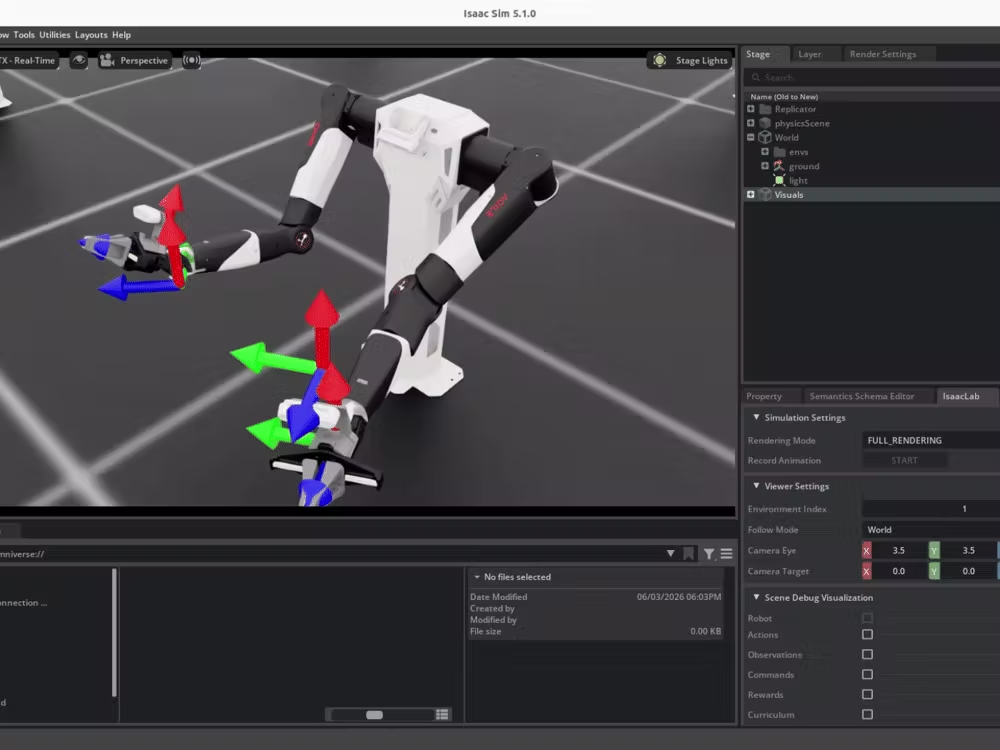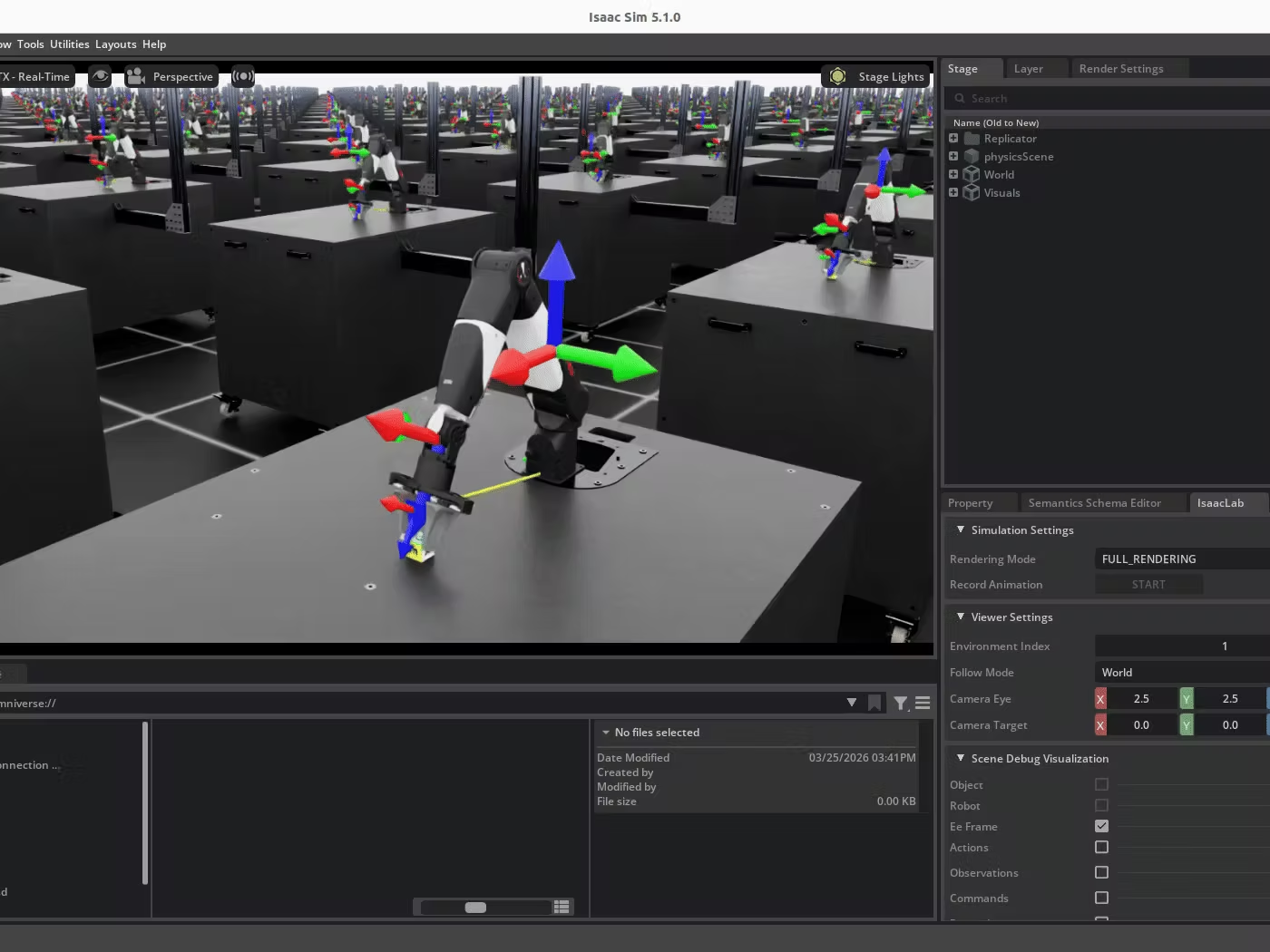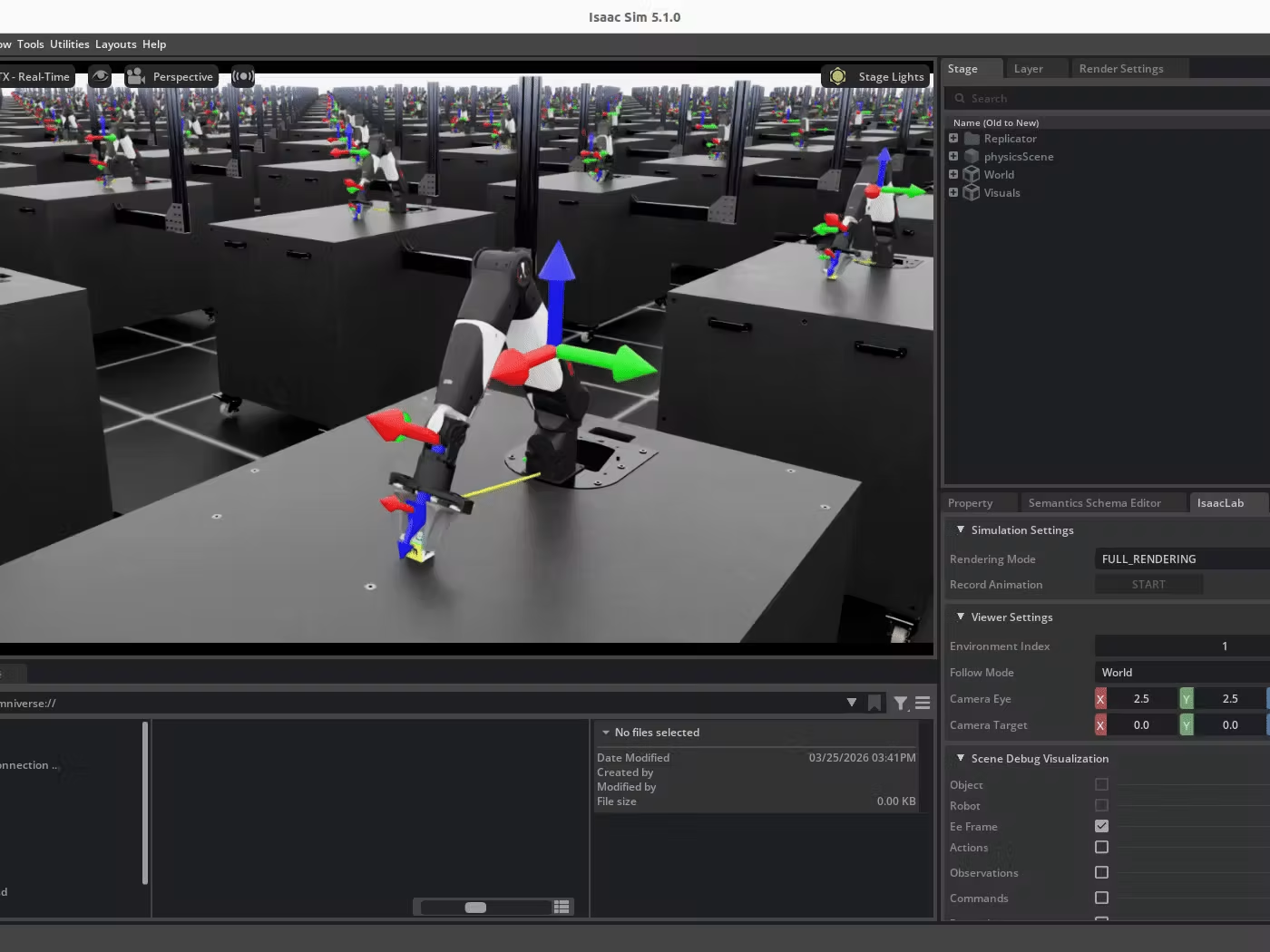
Things used in this project Hardware componentsNERO×1Software apps and online servicesIsaac LabStory Robotic manipulation remains one of the most important research directions in embodied AI. While traditional kinematics-based controllers provide stable motion execution, they often struggle in unstructured environments where adaptability is required.Recent advances in Reinforcement Learning (RL) have enabled robotic arms to learn task-oriented behaviors directly from interaction, making it possible to achieve robust control policies without manually designing every motion strategy.In this project, we extend the original SO-ARM101 Isaac Lab implementation by integrating the AgileX Dual-Arm Nero Manipulator, allowing developers to quickly train and validate dual-arm RL policies using NVIDIA Isaac Lab.ReposityOpen-source implementation:smalleha/isaac_so_arm101: Isaac Lab external project for SO-ARM100/101 arm robot.Project Structure├── robots│ ├── dual_nero│ │ ├── dual_nero.py│ │ ├── __init__.py│ │ ├── meshes│ │ └── urdf│ │ └── dual_nero.urdf├── scripts│ ├── rl_games│ │ ├── play.py│ │ └── train.py│ └── zero_agent.py├── tasks│ ├── __init__.py│ └── reach│ ├── agents│ ├── dual_nero_joint_pos_env_cfg.py│ ├── dual_nero_reach_env_cfg.py│ ├── __init__.py│ └── mdp└── ui_extension_example.pyKey additions include:
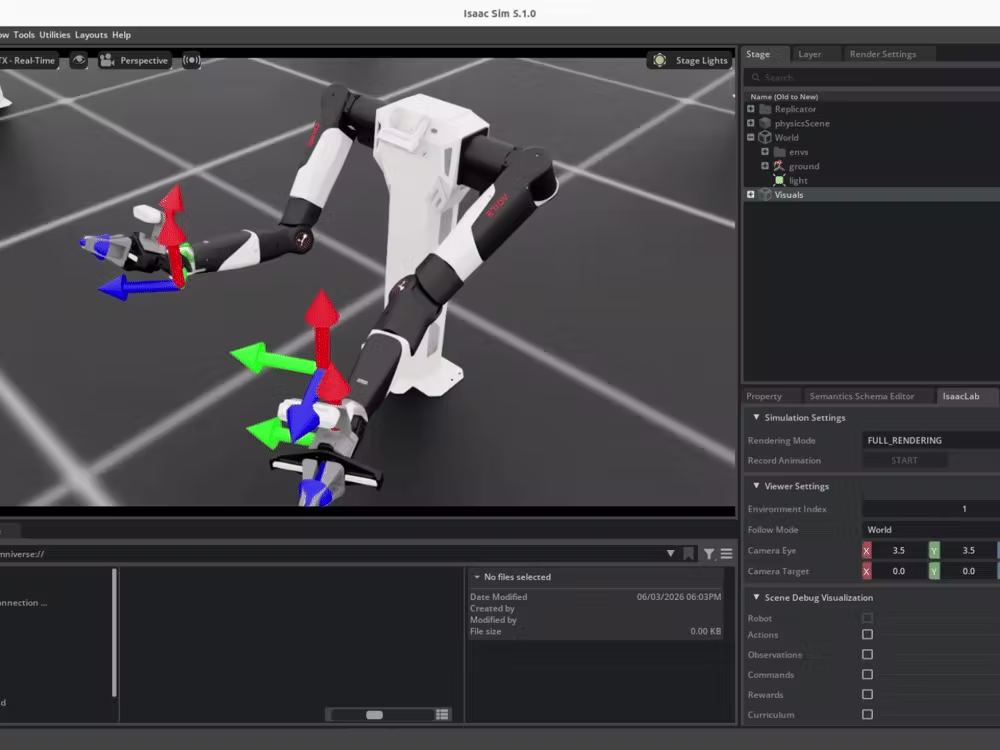
Isaac Lab Example: Dual-Arm Nero Reach Training
Train dual-arm reinforcement learning policies in NVIDIA Isaac Lab using the AgileX Nero manipulator and SO-ARM101 framework. By AgileX Robotics.
1,707 words~8 min read