Home
Storia in 1 fonti
Isaac Lab Example: Dual-Arm Nero Reach Training
Train dual-arm reinforcement learning policies in NVIDIA Isaac Lab using the AgileX Nero manipulator and SO-ARM101 framework. By AgileX Robotics.
Raccontata da hackster.io
hackster.io
Timeline cronologica
- ·
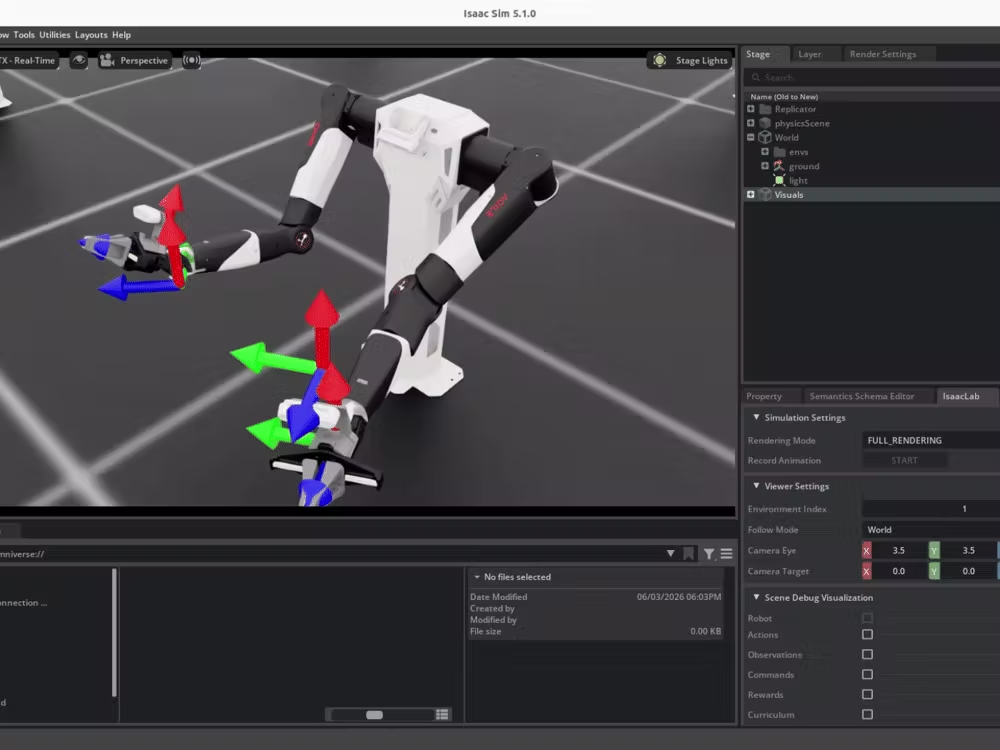
Train a Dual-Arm Nero Reach Task in Isaac Lab
We integrate the AgileX Dual-Arm Nero into Isaac Lab, enabling fast RL training and validation of robust dual-arm manipulation policies. By AgileX Robotics.
- ·
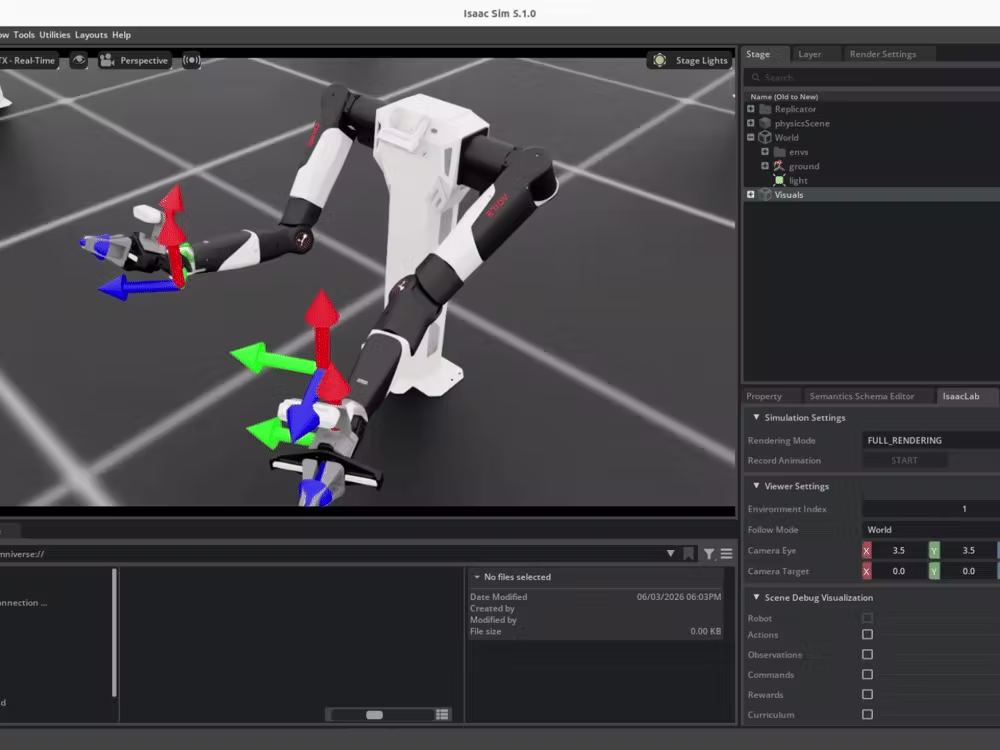
Isaac Lab Example: Dual-Arm Nero Reach Training
Train dual-arm reinforcement learning policies in NVIDIA Isaac Lab using the AgileX Nero manipulator and SO-ARM101 framework. By AgileX Robotics.