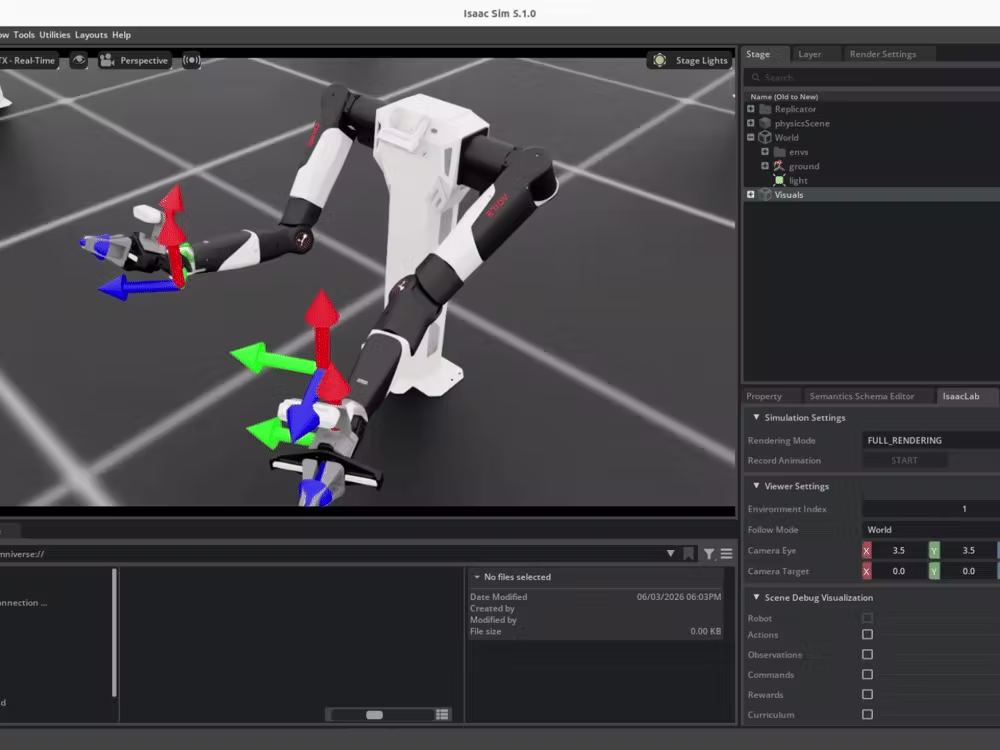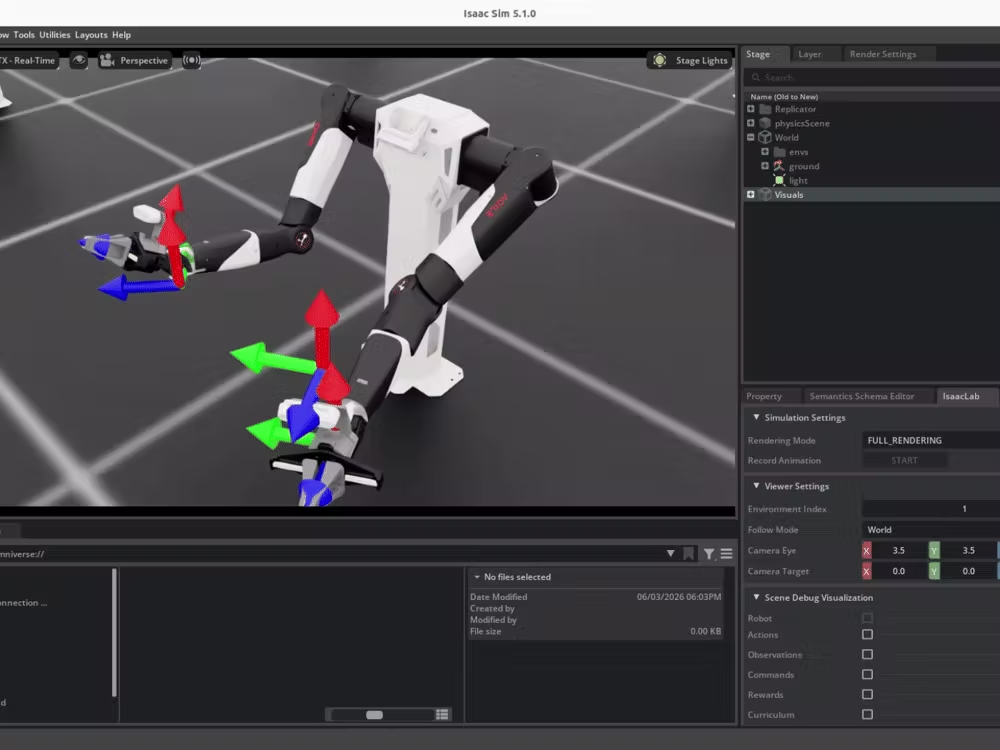
Things used in this project Hardware componentsROS2×1Nero×1Reinforcement Learning×1Story How to Build a Robot Arm RL Grasping System in Isaac Lab | NERO ArmThis project presents a reinforcement learning workflow for Embodied AI manipulation built on the Nero robotic arm, SO-ARM101, and NVIDIA Isaac Lab. It establishes a simulation-driven framework for training and evaluating robotic manipulation policies, with a focus on preparing the system for simulation-to-real transfer.Project SummaryTech StackRL training pipelinepolicy validation processrobotic manipulation task configurationsimulation-to-real transfer preparationKey SpecificationsProgramming Language: Python 3.8+Hardware: Nero Robotic Arm https://global.agilex.ai/products/neroBase Framework: SO-ARM101 https://github.com/MuammerBay/isaac_so_arm101Simulation Platform: NVIDIA Isaac LabOpen-source implementation:https://github.com/agilexrobotics/Agilex-College/tree/master/isaac_sim/agx_arm_IsaacLab
1. Project Setup and Environment Preparation1.1 Install Isaac LabFollow the official guide to install Isaac Lab:👉 Isaac Lab Pip Installation GuideWe use the pip-based installation method (recommended).Environment:Conda virtual environmentPython development environmentNVIDIA Isaac LabNero robotic arm project dependencies