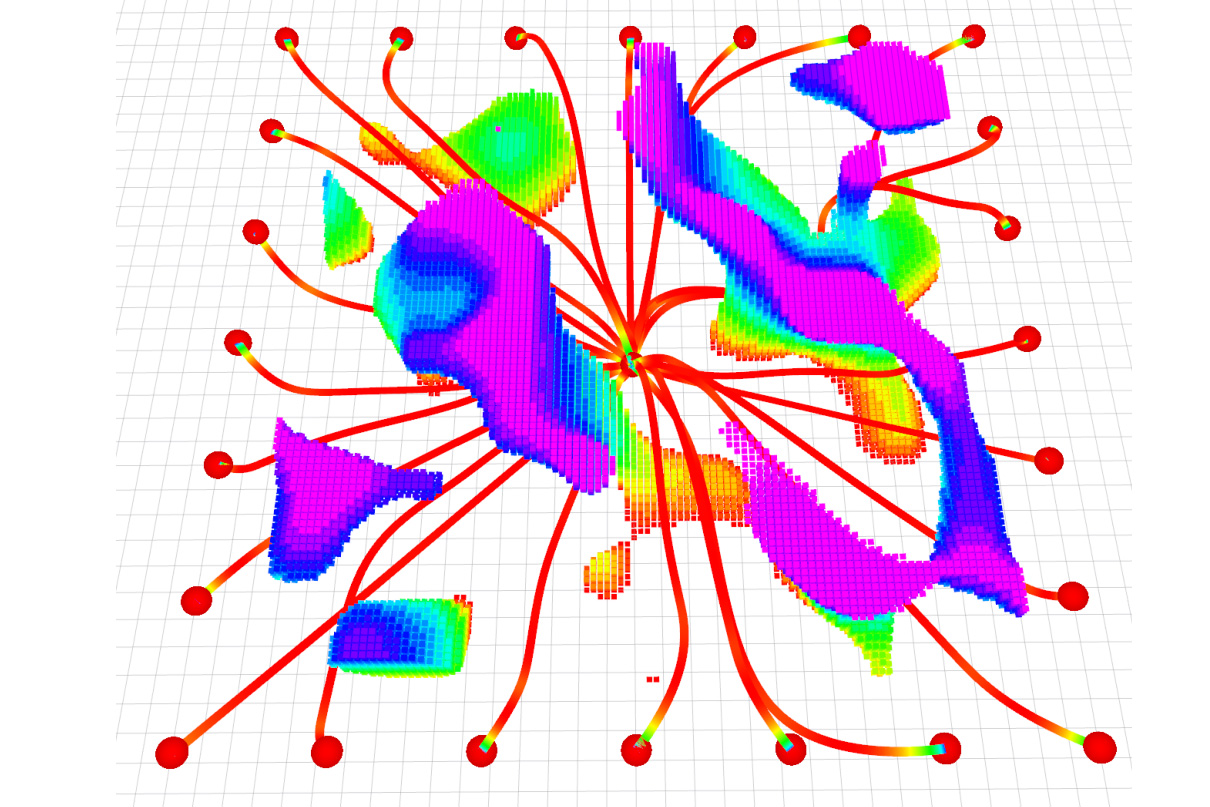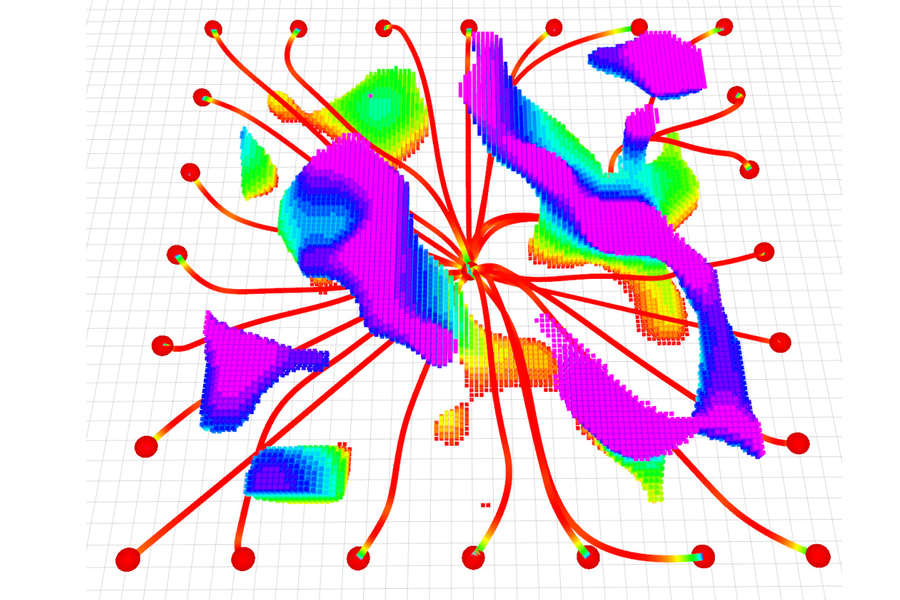
A figure shows multiple flight pathways as a UAV starts from the center and flies toward 24 goals (dots around perimeter). The flight pathways are mainly red and end in cool colors, showing reduced speed. The rainbow clouds represent obstacles, with cooler colors representing taller obstacles. Credit: Courtesy of the researchers.
By Adam Zewe
In the aftermath of a devastating earthquake, unpiloted aerial vehicles (UAVs) could fly through a collapsed building to map the scene, giving rescuers information they need to quickly reach survivors.
But this remains an extremely challenging problem for an autonomous robot, which would need to swiftly adjust its trajectory to avoid sudden obstacles while staying on course.
Researchers from MIT and the University of Pennsylvania developed a new trajectory-planning system that tackles both challenges at once. Their technique enables a UAV to react to obstacles in milliseconds while staying on a smooth flight path that minimizes travel time.