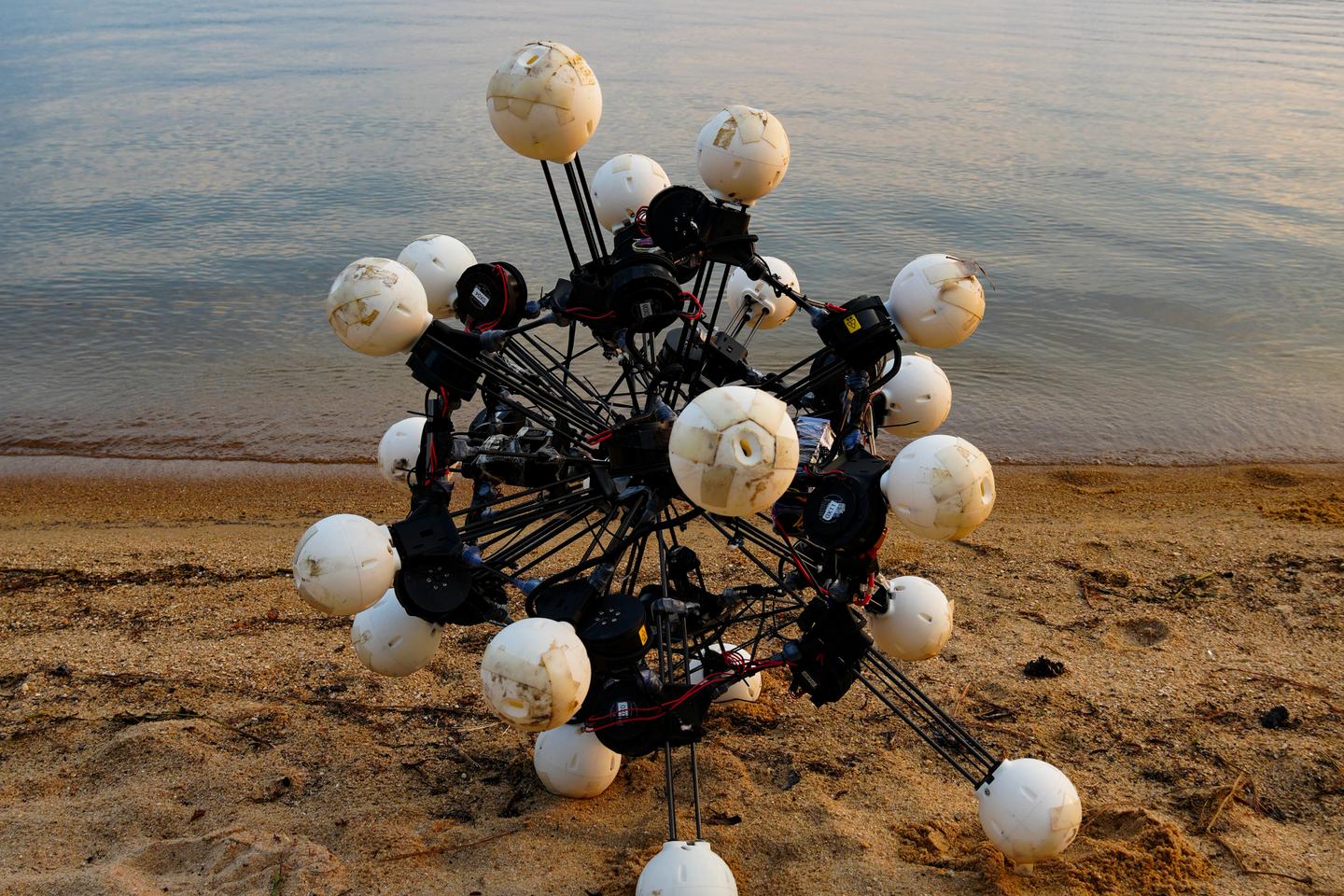
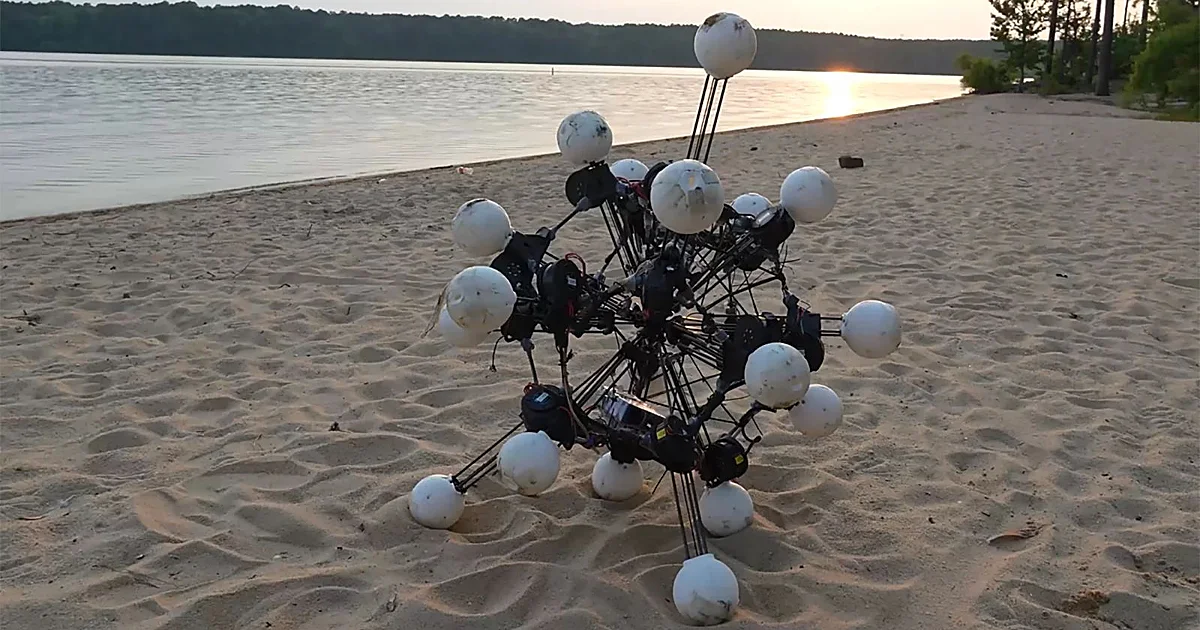
Wissenschaftler des General Robotic Lab der Duke University haben ein für Roboter eher ungewöhnliches Bewegungskonzept entwickelt und einen Roboter mit 20 teleskopartigen Beinen gebaut. Das ermöglicht dem Roboter eine gleichmäßige Fortbewegung. Er kann außerdem unmittelbar die Bewegungsrichtung wechseln, Lasten transportieren und nahezu jede Geländeformation bewältigen.
Die Forscher ermittelten das Design des Roboters über eine Simulation von mehr als 1500 Roboterkonfigurationen, um einen Roboter zu erhalten, der sich optimal fortbewegen kann. Das Aussehen sollte dabei keine Rolle spielen. Herausgekommen ist ein Roboter ohne Vorder- und Rückseite, wie aus der Studie „Extreme Dynamic Symmetry Enables Omnidirectional and Multifunctional Robots“ hervorgeht, die in Science Robotics erschienen ist.
Der Roboter, Argus genannt, ist kugelförmig aufgebaut. Insgesamt 20 modulare Teleskopbeine gehen strahlenförmig von einem Zentralrumpf in Form eines Dodekaeders aus. Der Körper verfügt entsprechend über zwölf fünfeckige Flächen, von denen die Beine ausgeben. An den Beinenden ist jeweils eine Tiefenkamera angebracht, mit der der Roboter seine Umgebung wahrnimmt. Durch die Verwendung eines gleichmäßigen Dodekaeders als zentralen Körper sind die 20 Beine gleichmäßig um ihn herum angeordnet. Das sorgt dafür, dass über die Kameras jederzeit auch eine optimale Sicht in alle Richtungen gegeben ist.