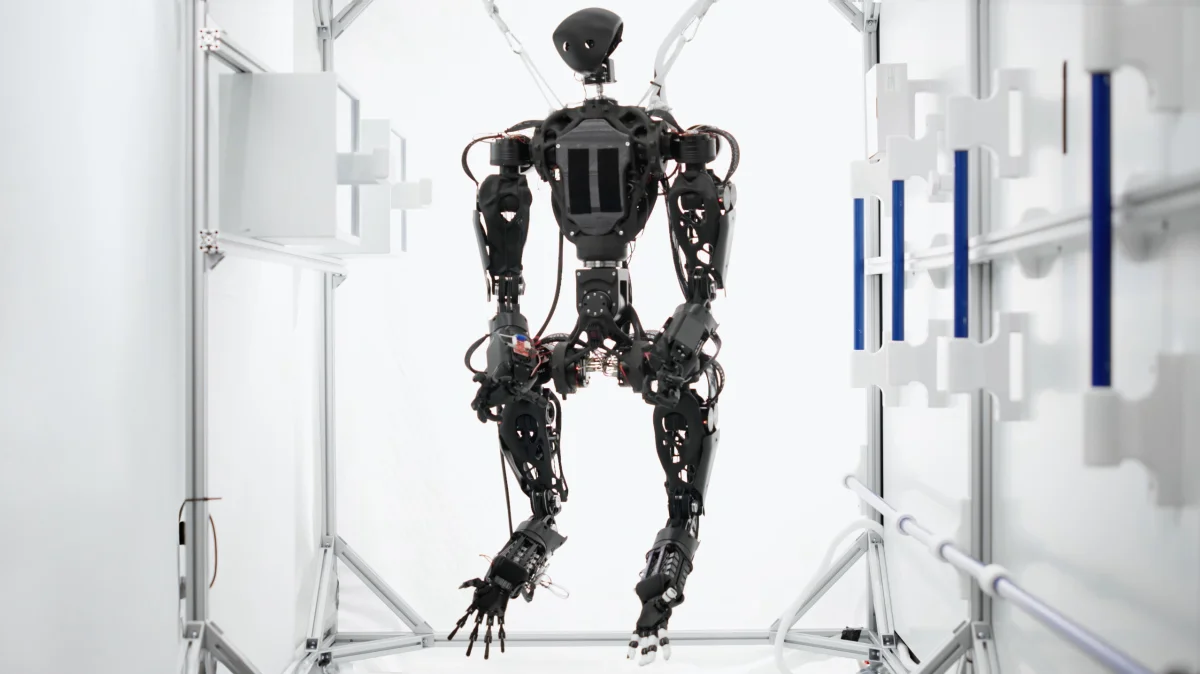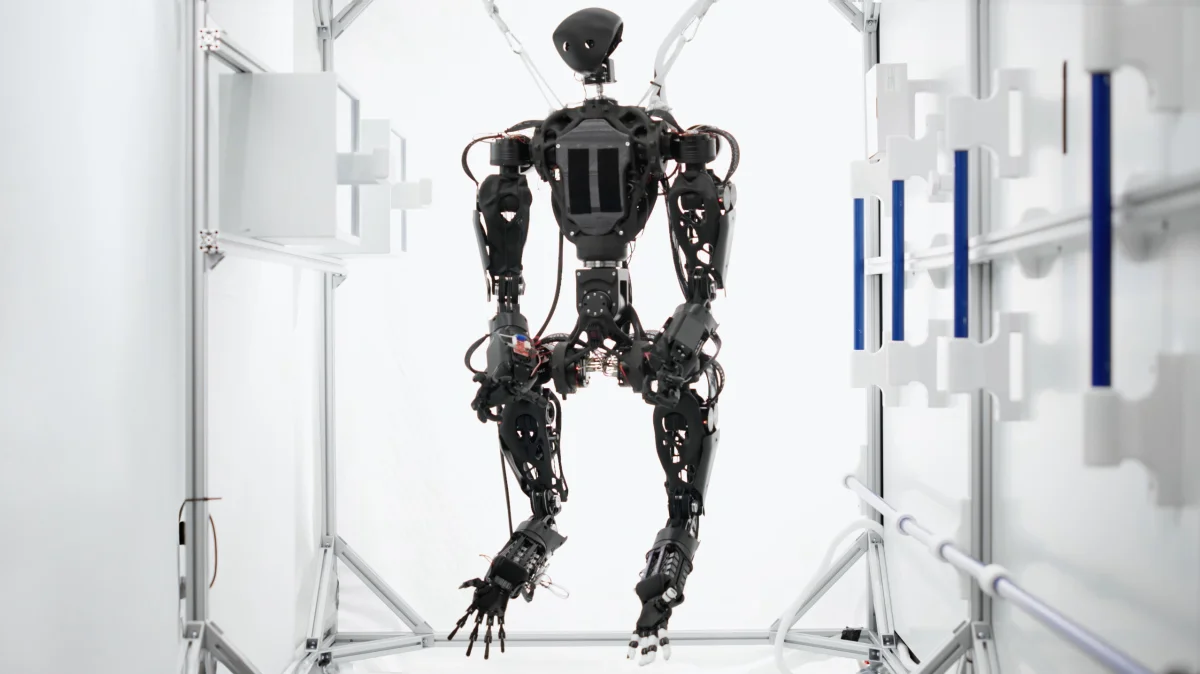
Das kanadische Unternehmen Orbit Robotics, ein Fokusprojekt der Eidgenössisch Technischen Hochschule Zürich (ETH Zürich), hat einen humanoiden vierarmigen Roboter mit dem Namen Helios für die Nutzung in der Schwerelosigkeit einer Weltraumstation entwickelt. Beine besitzt der Roboter nicht. Die benötigt er in der Schwerelosigkeit auch nicht. Stattdessen haben ihm die Ingenieure ein zusätzliches Paar Arme mit Händen angeschraubt. Damit soll der Roboter mehr Aufgaben zugleich erledigen können.
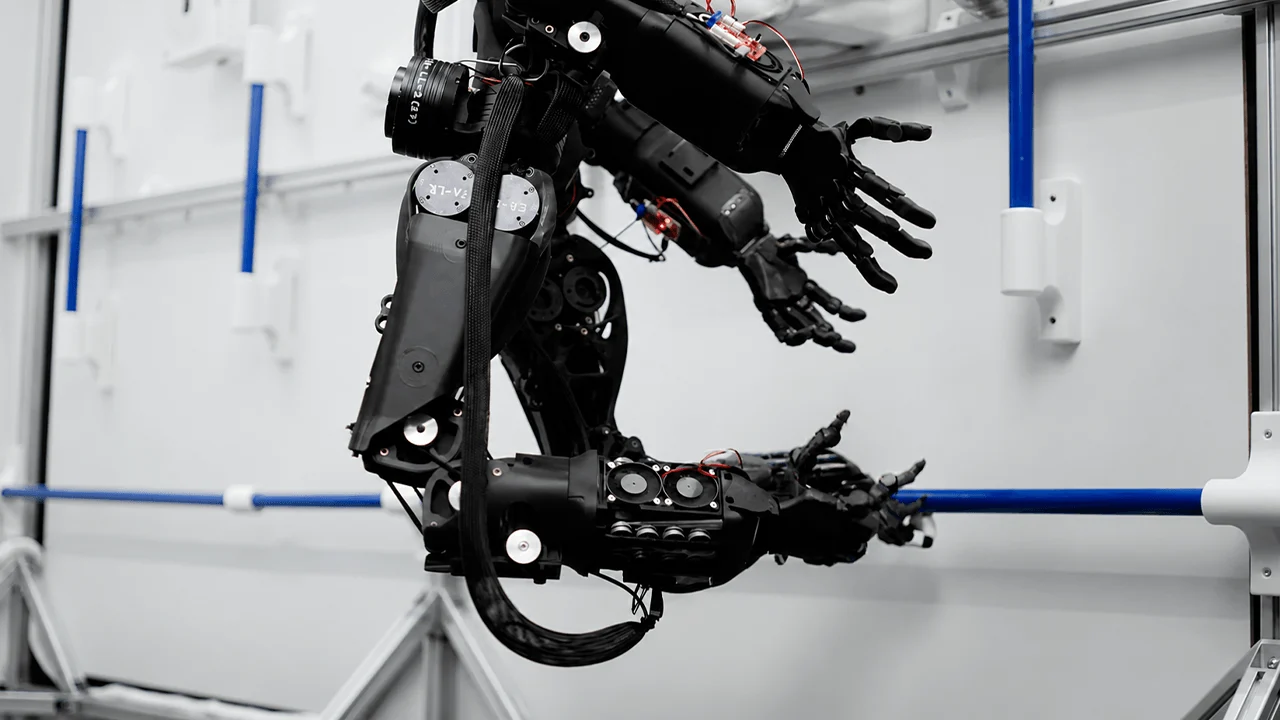
Helios ist nicht wie ein klassischer Roboter mit rotierenden Aktuatoren aufgebaut. Stattdessen werden seine vier Arme, die an einem humanoiden Oberkörper befestigt sind, elektromotorisch über seilgetriebene Umlenkrollen bewegt. Der gesamte Aufbau sei dadurch leichter und nachgiebiger. Die Motoren sind nahe an den Schultergelenken platziert, um die bewegte Masse kleinzuhalten und die Effizienz zu steigern. Das Ellenbogengelenk ist als Rollkontaktgelenk ausgeführt, um eine reibungsarme, geschmeidige Bewegung zu erzeugen. Das Gelenk ist dadurch kräftig, bewahrt zugleich aber eine gewisse Flexibilität.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.