HomeAI · summaries
Storia in 2 fonti
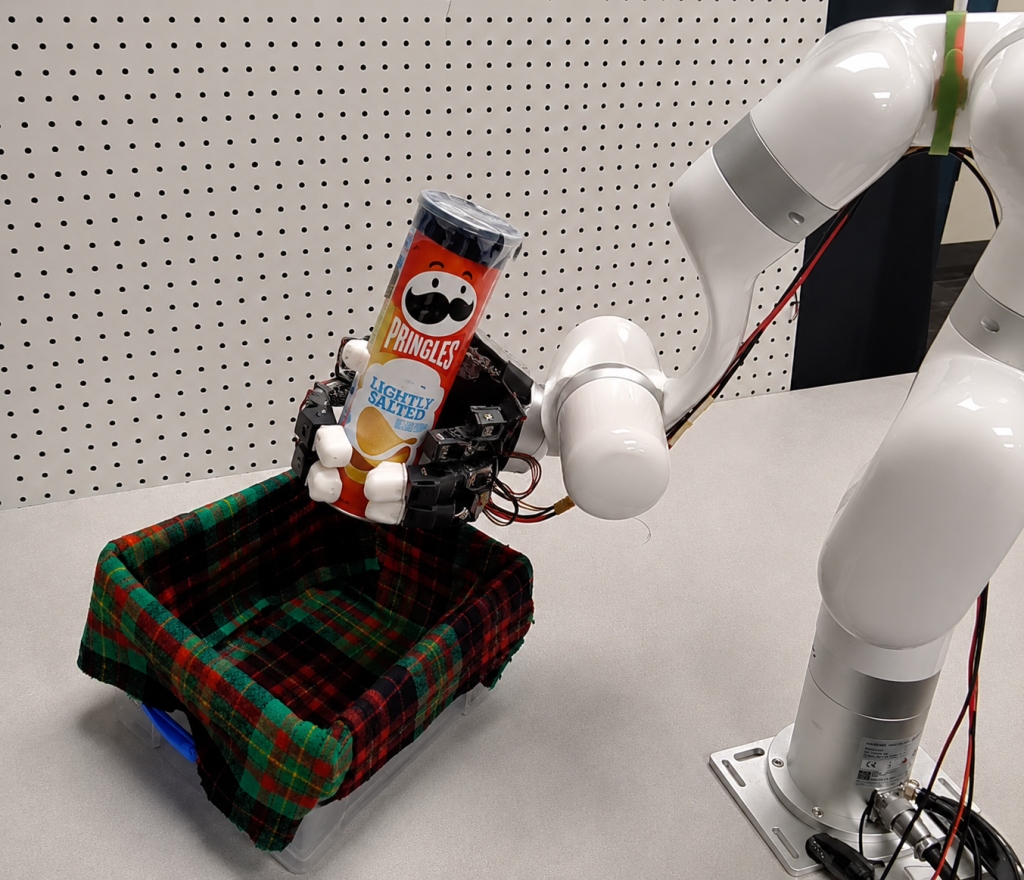
CMU Researchers Train Robots With Internet Videos - Robotics Institute Carnegie Mellon University
Researchers in Carnegie Mellon University's School of Computer Science are developing a new way for robots to learn everyday tasks like grasping a coffee mug or opening a drawer by watching videos of people interacting with objects. Their system, VideoManip, converts these videos into training data that can be used to teach robots dexterous manipulation skills.
Confronto fonti
2 prospettive sulla stessa storiaTimeline cronologica
- ·
ri.cmu.edu
CMU Researchers Train Robots With Internet Videos - Robotics Institute Carnegie Mellon University
Researchers in Carnegie Mellon University's School of Computer Science are developing a new way for robots to learn everyday tasks like grasping a coffee mug or opening a drawer…
- ·
cryptobriefing.com

Berkeley researchers convert internet videos into robot training data
UC Berkeley researchers built a pipeline converting internet videos of hands into 3D robot training data, potentially solving robotics' costly data shortage