Driving a robot in simulation is easy. Bringing it into the real world? That's where the fun — and the headaches — begin.
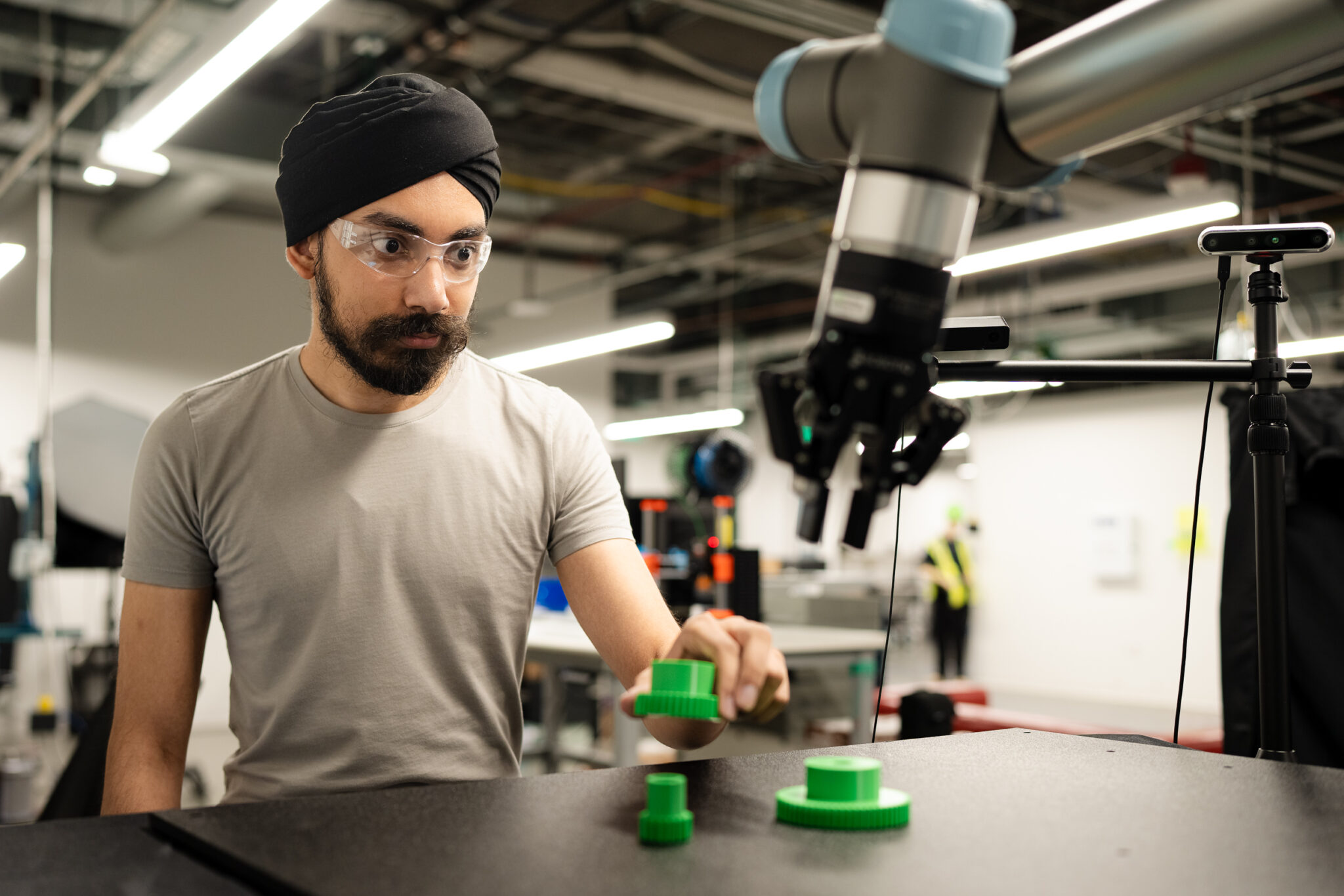
If you're building a custom 2WD differential drive robot using the Yahboom 4-Channel Encoder Motor Driver Board and 520 DC Motors, you'll quickly hit a classic hardware challenge: how do you send velocity commands (cmd_vel) and read back encoder data (odom) over a single serial pipeline without crashing your nodes?
In this post, we'll cover how the Yahboom board handles raw data packets, why multi-node serial setups fail, and how to write a unified ROS 2 Python bridge that solves the whole problem cleanly.
How the Yahboom 4-Channel Driver Actually Works
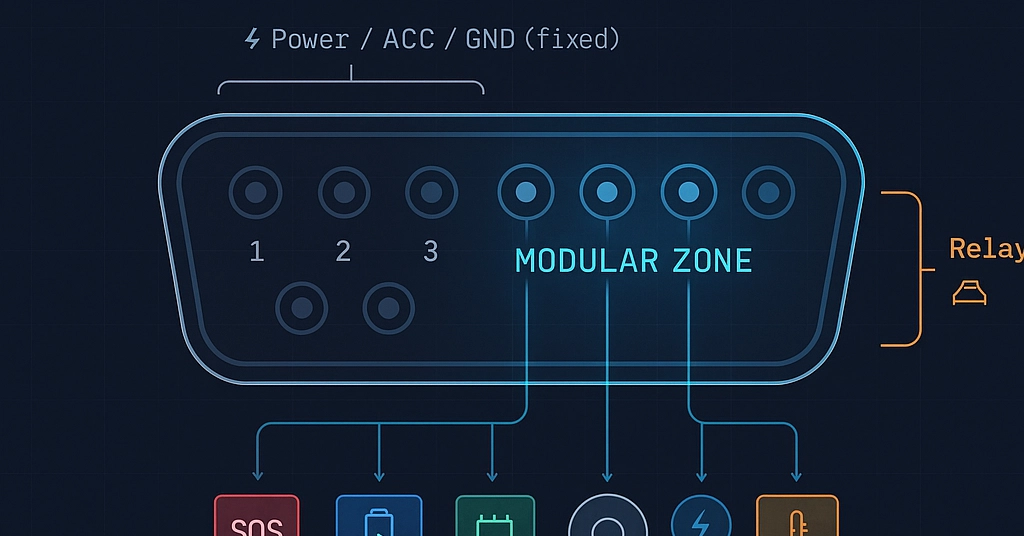
Unlike passive motor drivers (like an L298N) that require your main processor to count high-frequency square waves via hardware interrupts, the Yahboom 4-Channel Board acts as an intelligent coprocessor. Its onboard STM32F103RCT6 microcontroller handles all the time-critical work: reading Hall-effect encoders, running PID control loops, and managing state changes.