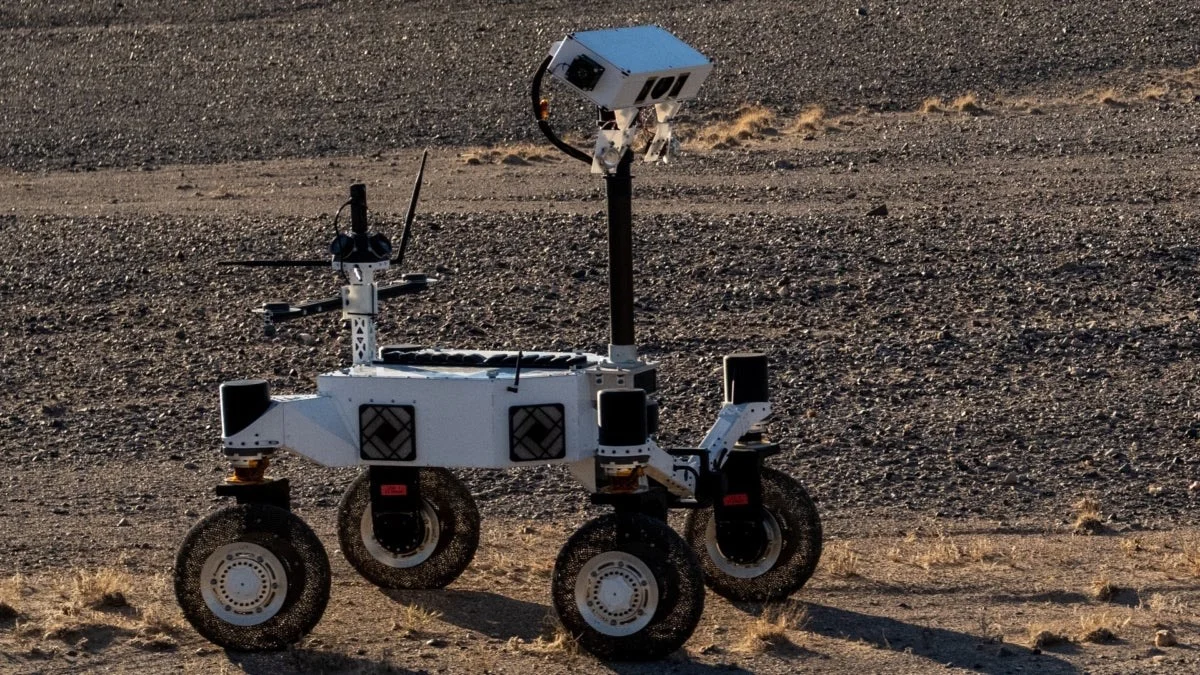
Developed at NASA’s Jet Propulsion Laboratory, ERNEST (Exploration Rover for Navigating Extreme Sloped Terrain) is used in a desert field test to help refine mobility hardware and autonomy software that could be used for a potential future long-range lunar rover mission. Credit: NASA / JPL-Caltech
A prototype rover built with a new design for tackling rugged terrain is helping teams refine capabilities that could one day be used on future lunar and Red Planet missions.
On a bleak stretch of the Colorado Desert in Southern California, a compact four-wheeled rover recently trundled about 16 miles (26 kilometers) with minimal intervention from the team of engineers trailing it. Called ERNEST (Exploration Rover for Navigating Extreme Sloped Terrain), this prototype is being used by NASA to advance both robotic autonomy and the ability to traverse challenging landscapes.
Developed at NASA's Jet Propulsion Laboratory in Southern California, ERNEST is 4 feet (1.2 meters) long. Not only can it lift each of its mesh wheels to get past obstacles that would stymie Curiosity and Perseverance, NASA's six-wheeled Mars rovers, but the prototype also has enhanced independent decision-making capabilities. These mobility and autonomy advances could be infused into future missions that will venture to previously inaccessible areas of the Red Planet or the moon.