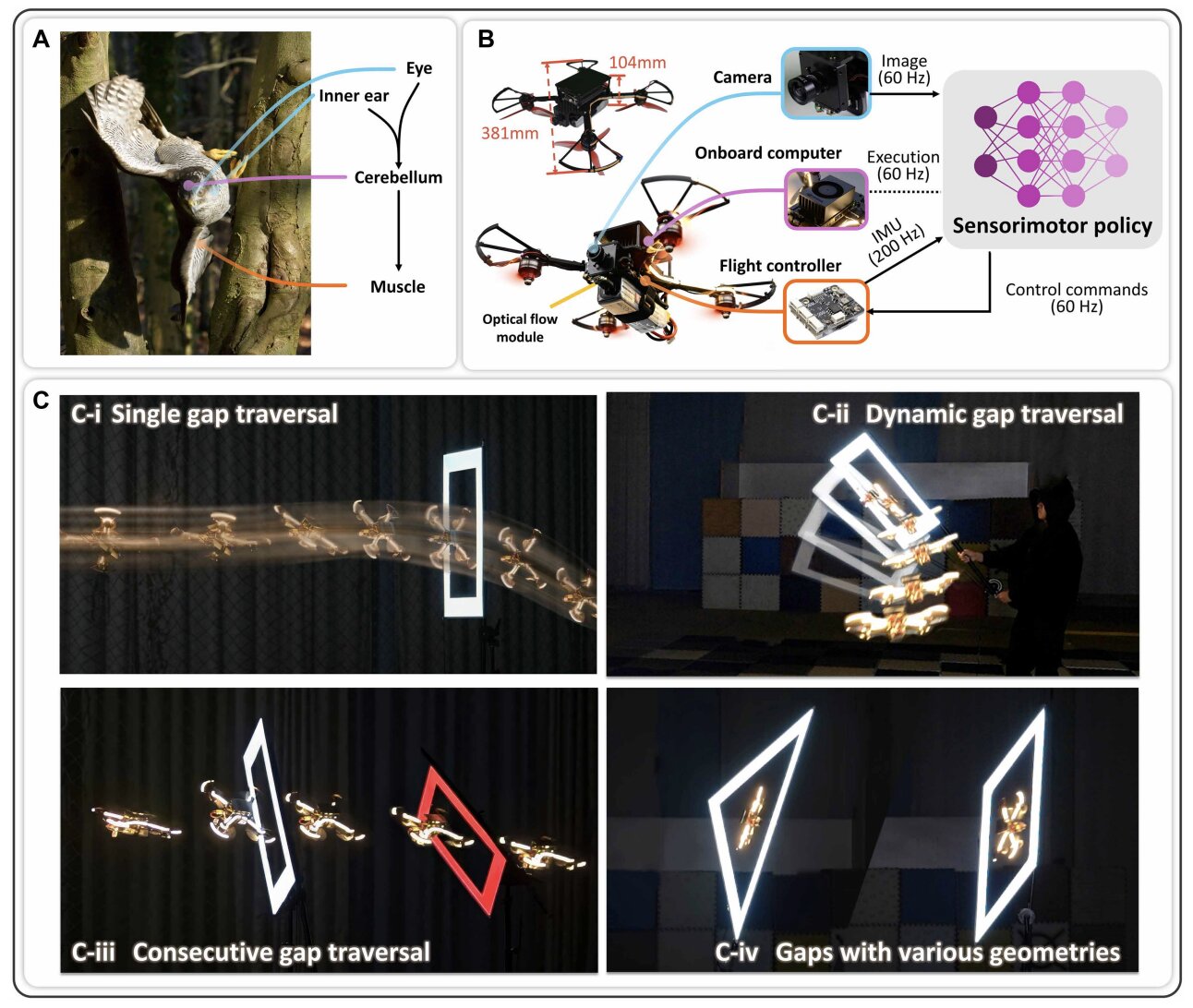
Working principle and system implementation. Credit: Wu et al. (Science Robotics, 2026).
Unmanned aerial vehicles (UAVs), commonly known as drones, are now widely used for various purposes, ranging from filmmaking and aerial photography to industrial inspection, precision farming and reaching obstructed areas during emergency response missions. While many existing drones can move swiftly in their surroundings and circumvent large obstacles, most still struggle in cluttered environments. In addition, they are often unable to execute maneuvers that would allow them to safely pass through small gaps or reach secluded areas.
Researchers at Zhejiang University recently developed new control strategies that could improve drones' ability to precisely perform complex maneuvers and pass through extremely narrow openings. These policies, presented in a paper published in Science Robotics, were trained to convert information collected by onboard sensors into motor commands using a machine-learning approach known as reinforcement learning (RL).
"One of the most relevant problems is aggressive traversal through narrow gaps with quadrotors under constraints in the special Euclidean group of three dimensions, which requires the quadrotors to leverage a momentary tilted attitude and the asymmetry of the airframes to navigate through gaps," wrote Tianyue Wu, Guangtong Xu and their colleagues in their paper. "We achieved such maneuvers by developing sensorimotor policies directly mapping onboard vision and proprioception into low-level control commands."