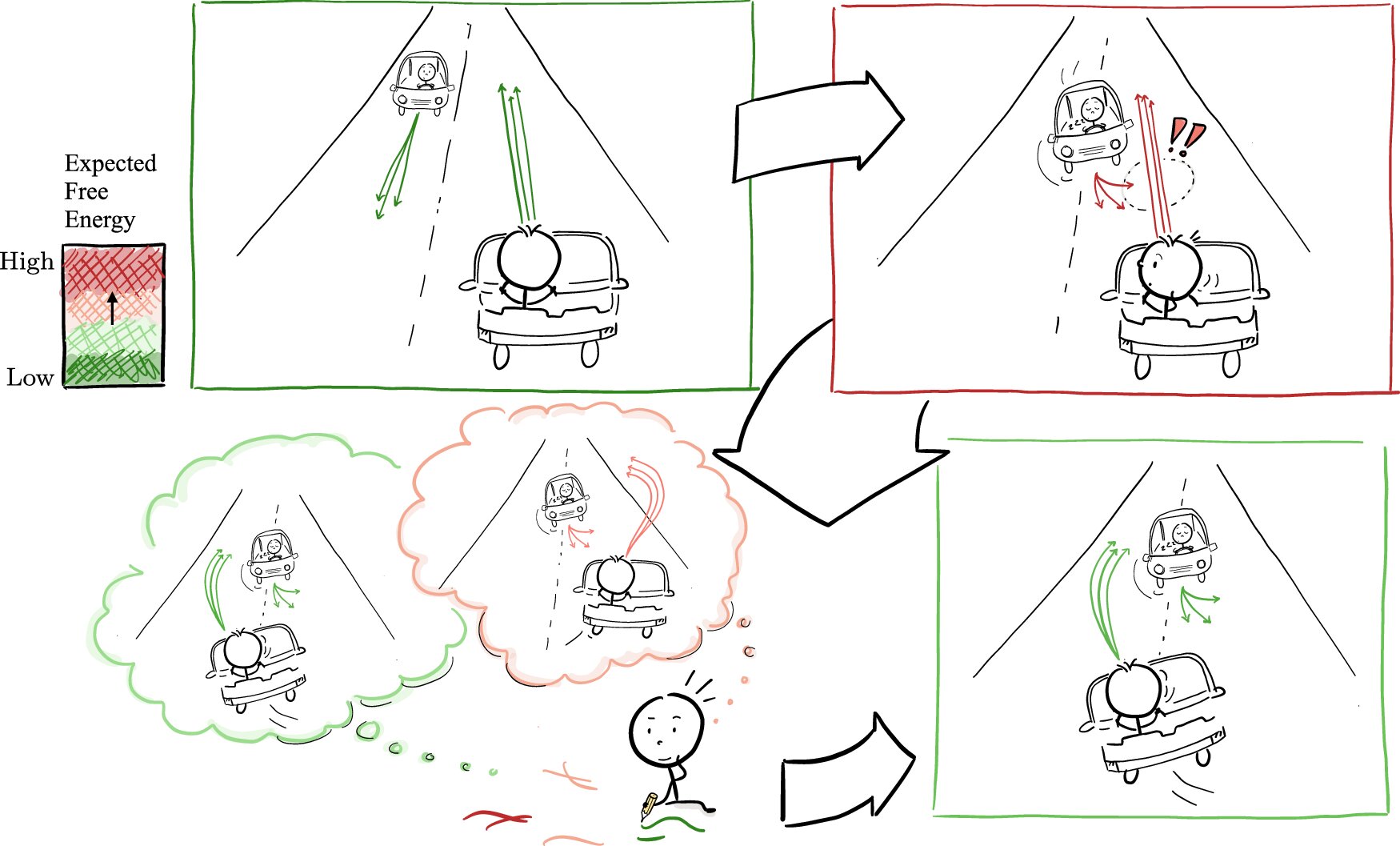
Illustration of the key principles of the active inference model in the opposite-direction lateral incursion scenario. Credit: Nature Communications (2026). DOI: 10.1038/s41467-026-73345-0
Autonomous vehicles are already a reality on some of our streets and could become a major part of future transportation systems. Safety, of course, is the main concern, as with all vehicles. To help evaluate and improve its autonomous driving technology, U.S. driverless vehicle company Waymo has created a virtual representation of human driver behavior in near-crash situations.
Human drivers avoid collisions by instantly perceiving a hazard, deciding how to react and then executing the maneuver. It all happens in a split second thanks to the central and peripheral nervous systems working together harmoniously.
Currently, testing and training for collision avoidance involve several systems, and each often tests only a specific scenario or metric. For example, one system might only look at what happens when a lead vehicle brakes suddenly. They do not capture the whole sequence of events from detection to actual avoidance.
Behavioral crash-test dummy








