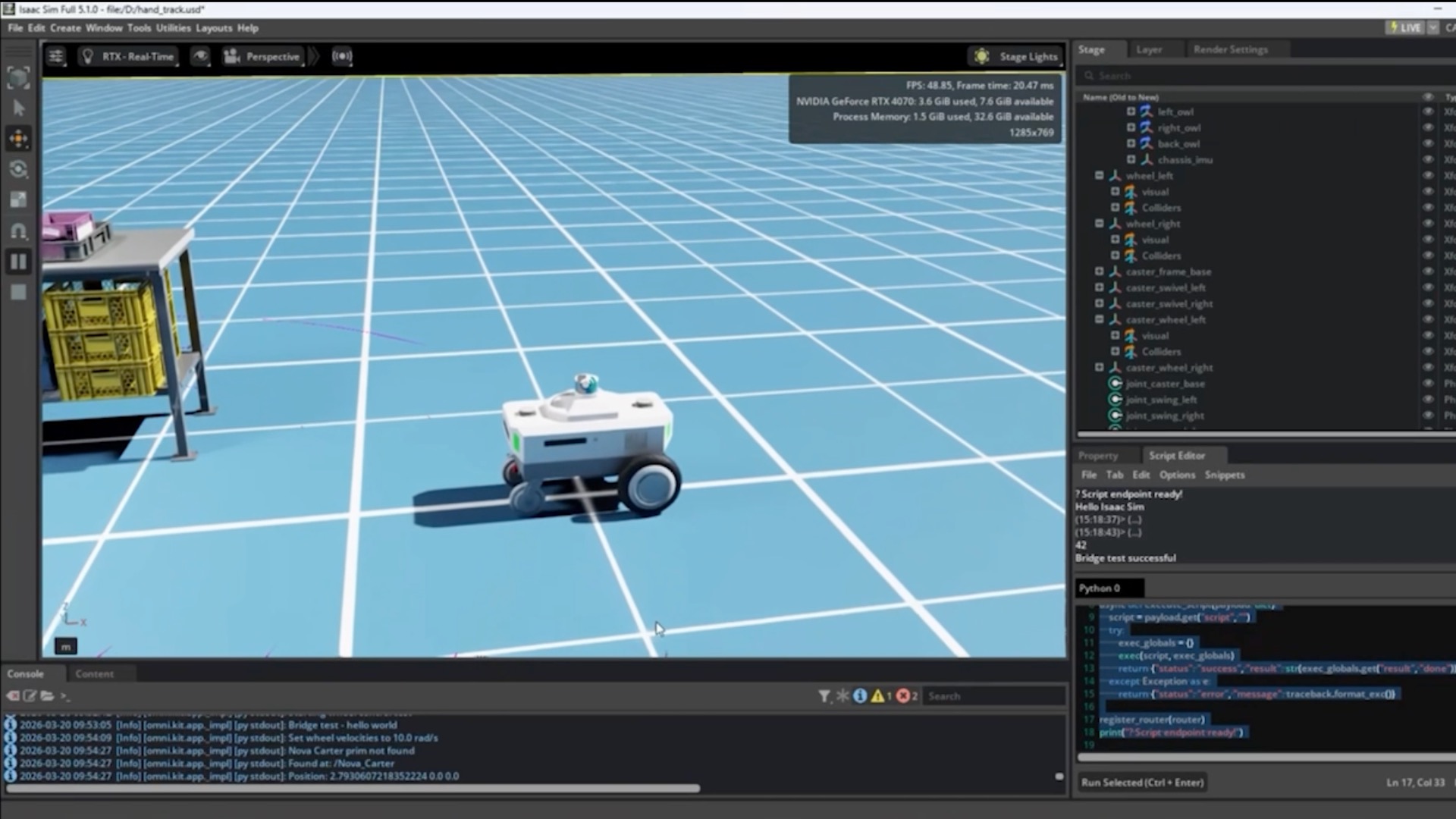
Physical AI—AI systems that perceive, reason, and act in physically grounded simulated environments—is changing how teams design and validate robots and industrial systems, long before anything ships to the factory floor. At GTC 2026, NVIDIA highlighted physical AI as a key direction for robotics and digital twins, where policies are trained and validated against physically grounded environments.
To make NVIDIA Omniverse easier to integrate into existing applications, NVIDIA is adding a modular, library‑based architecture alongside the existing platform. Core Omniverse components—RTX rendering, PhysX‑based simulation, and data storage pipelines—are being exposed as standalone, headless‑first C APIs with C++ and Python bindings: ovrtx, ovphysx, and ovstorage. For developers with established stacks, these libraries reduce the need for major architectural rewrites and let you integrate Omniverse capabilities without adopting the full Omniverse container stack.
Delivering value through modular simulation
In large robotics and industrial deployments, monolithic runtimes can make it difficult to scale simulations, deploy headlessly, or integrate with existing CI/CD systems. A library‑first architecture addresses these constraints by embedding rendering, physics, and storage directly into your existing services instead of running everything inside a single Omniverse runtime. Instead of adopting a full application framework, teams can now call Omniverse rendering, physics, and storage APIs directly from their own processes and services.