Home
Storia in 1 fonti
Learning robust controllers that work across many partially observable environments - Robohub
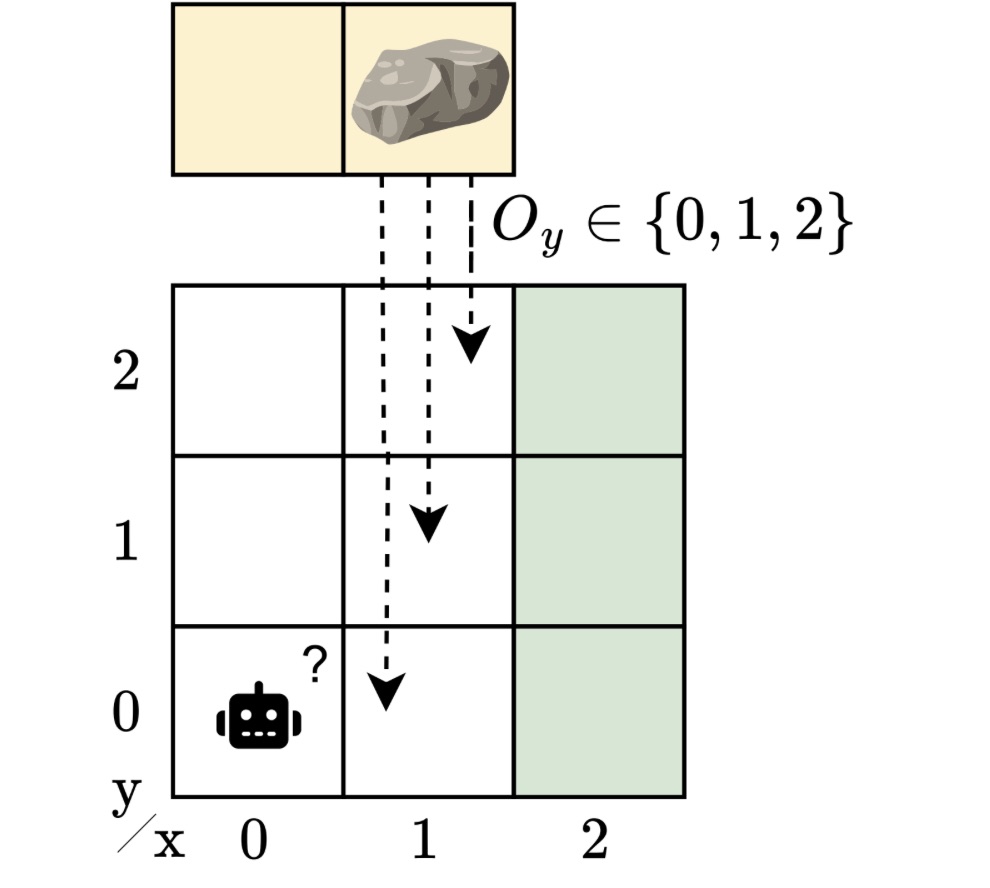
In intelligent systems, applications range from autonomous robotics to predictive maintenance problems. To control these systems, the essential aspects are captured with a model. When we design controllers for these models, we almost always face the same challenge: uncertainty. We’re rarely able to see the whole picture. Sensors are noisy, models of the system are imperfect; the world never behaves exactly as expected.
Raccontata da robohub.org
robohub.org