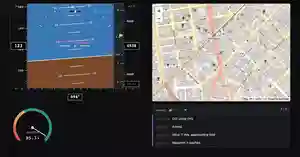
I had a quadcopter publishing telemetry over MAVLink and a stubborn preference for not leaving the browser. QGroundControl and Mission Planner are both excellent, but they are native apps, and the thing I actually wanted was a status page the rest of the team could open in a tab. Attitude, position, battery, and a running log of whatever the flight controller was complaining about.
The catch is that a drone publishes attitude at 30 to 50 Hz, and the first React version of this that anyone writes tends to fall over the moment real data arrives. You wire each reading to a piece of state, the state updates a few dozen times a second across five or six components, and React spends its whole frame budget reconciling instead of drawing. The display either lags behind the aircraft or, worse, different instruments end up showing different instants of the same moment.
So I built it with Altara, a set of telemetry components I maintain that keep the high-frequency path off React's render cycle. This post builds the ground control station in two passes. First the entire dashboard in mock mode, with no drone and no rosbridge involved, so you can get the layout and styling right against animated data. Then we point the exact same components at a real MAVROS stack.