When it comes to autonomous driving, the purpose of a world model goes beyond generating photorealistic scenes. Its role is to serve as a training system that can model interaction, be checked against reality, and increasingly pinpoint where its own assumptions fail, then improve before mistakes reach the road.
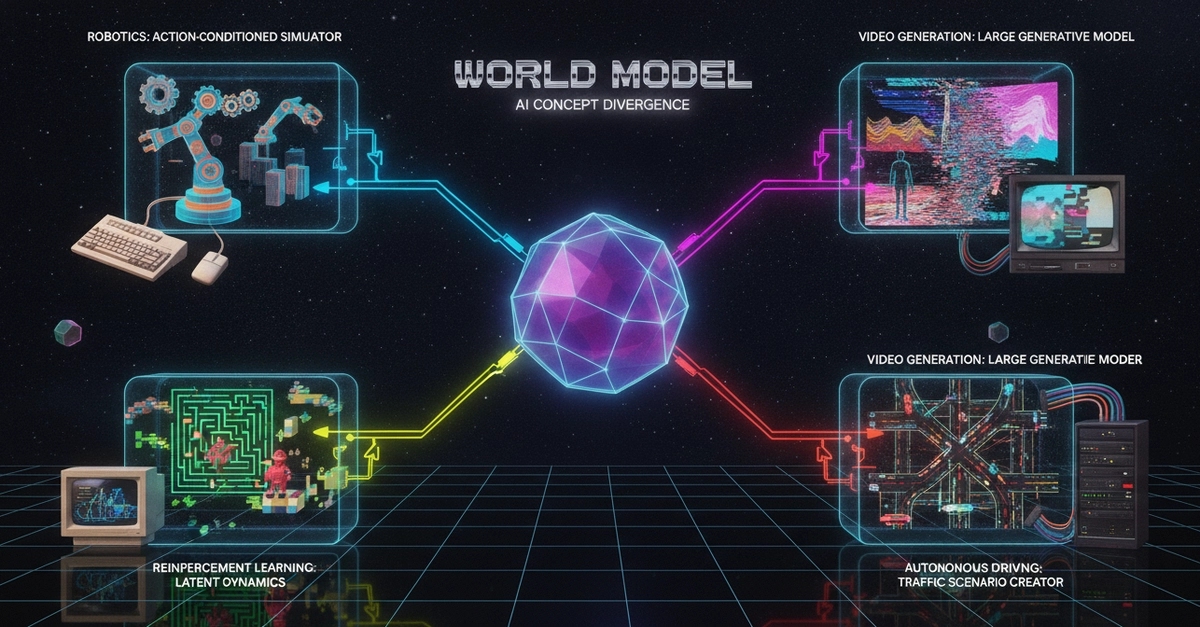
“World model” has become one of the most fashionable terms in the field of artificial intelligence. Often, it refers to systems that generate video, synthetic environments, or other data and assets to cover myriad edge cases. For self-driving, that definition appears somewhat narrow. A world model that matters is not just a simulator. It is a training system, one that represents how the world evolves, predicts how other agents respond to the car, and can be corrected when reality proves it wrong.
That distinction matters because autonomous driving is no longer only a perception problem, and imitation alone does not suffice to solve it.
Consider an unprotected left turn. An autonomous car is not simply detecting objects in its proximity. It is entering a negotiation. Will an oncoming car slow down or speed up? Will a cyclist hold course or drift? Will a pedestrian step forward or hesitate? And just as important, how will each of them respond once the car begins to move?