The team, OxBots, was formed this academic year as part of Engineers Without Borders Oxford (EWBOx), marking the return of student-led robotics competition at Oxford for the first time since 2022.
Led by Azka Adziman (2023, MEng), the initiative has played a key role in re-establishing Oxford’s presence in student robotics competitions. Azka brought together a multidisciplinary team of 13 students to design and build a fully autonomous competition robot.
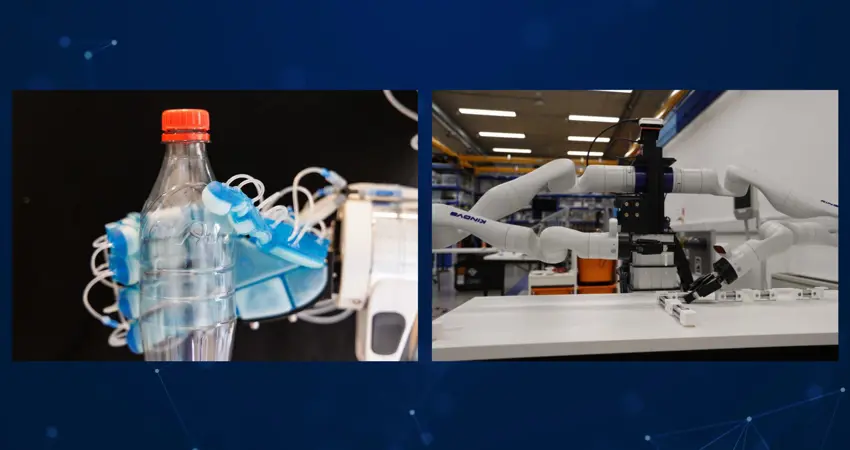
Competing against 30 other university teams, OxBots placed second in a challenge requiring robots to collect ping pong balls and metal ball bearings and deposit them into their goal. The catch: robots had to operate entirely autonomously, with no human control. To meet this challenge, the team developed systems for localisation using AprilTag detection, object recognition, and real-time decision-making. The robot was designed and built from scratch, integrating mechanical, electronic and software components into a single system.
The team was structured into CAD, electronics and software groups. The CAD team iterated on the robot’s roller intake mechanism through rapid prototyping and 3D printing, helping to give OxBots a competitive edge in ball collection. The electronics team focused on power distribution and component selection, while the software team developed algorithms enabling the robot to detect, track and remember ball locations to inform its strategy.