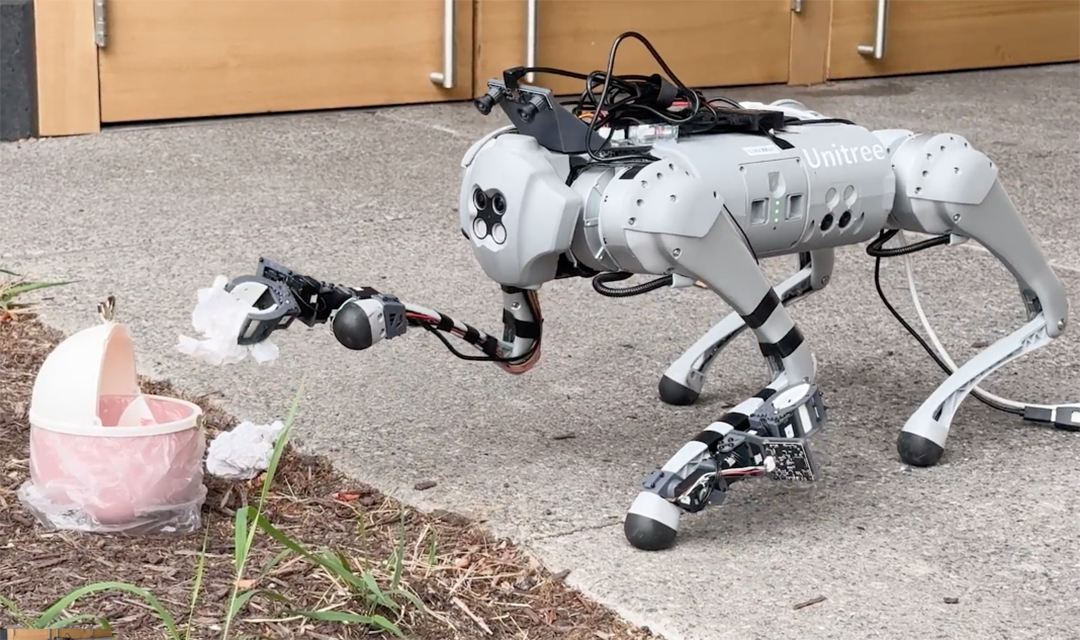
Within the next decade, chances are your neighbors, or maybe even you, will be sharing a home with a robot roommate to lend a hand with everyday tasks. At Carnegie Mellon University, researchers in Ding Zhao’s Safe AI Lab are teaching robots to perform better by the day. The team has introduced a new machine learning framework that trains four-legged robot “dogs” how to perform versatile movements like pouring soda, organizing shoes, and even cleaning up cat litter.
Human2Locoman combines immersive teleoperation, large-scale data collection, and a modular learning framework to teach quadrupedal robots complex manipulation skills via human demonstrations and teleoperated robot movements. It bridges the “embodiment gap” between humans and robots and marks a significant advancement in quadrupedal manipulation learning.
Human2Locoman is powerful enough to help robots handle situations and objects they have never seen before.
Ding Zhao, Associate Professor, Mechanical Engineering
“Human2Locoman is powerful enough to help robots handle situations and objects they have never seen before,” explains Zhao, associate professor of mechanical engineering. “This new pretraining approach particularly helps in tasks that require precise localization and smooth motions.”