As it becomes more evident to general contractors that autonomous drones can efficiently survey land and inspect infrastructure without pilots on the ground, the global drone construction market is expected to grow into a nearly $20 billion industry. Kenji Shimada aims to make this ever-growing industry safer by eliminating concern about onsite drone collisions.
Navigating dynamic environments
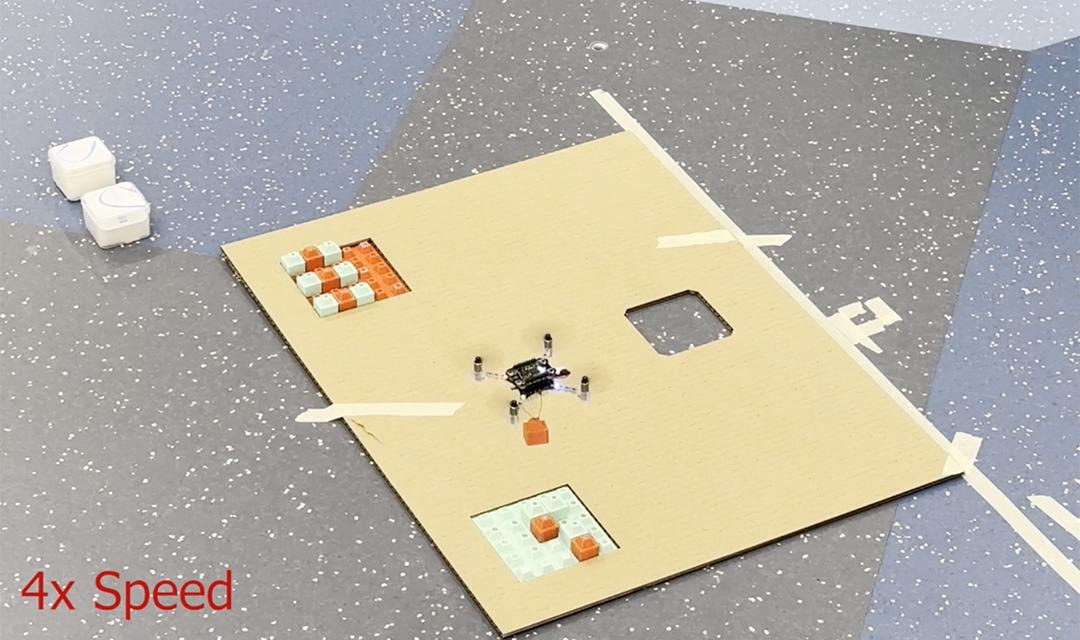
In order to avoid a collision, drones must be two steps ahead of the objects around them. This starts by ensuring the drone can “see” everything in its path. Shimada, a professor of mechanical engineering, does this by installing both a high-quality camera and radar sensor onto the drones. This allows the drone to “see” 3D objects around it and understand its distance from each object and person. Because the drone is collecting data from different sensors, each data set can be cross-checked for accuracy, which adds another layer of security.
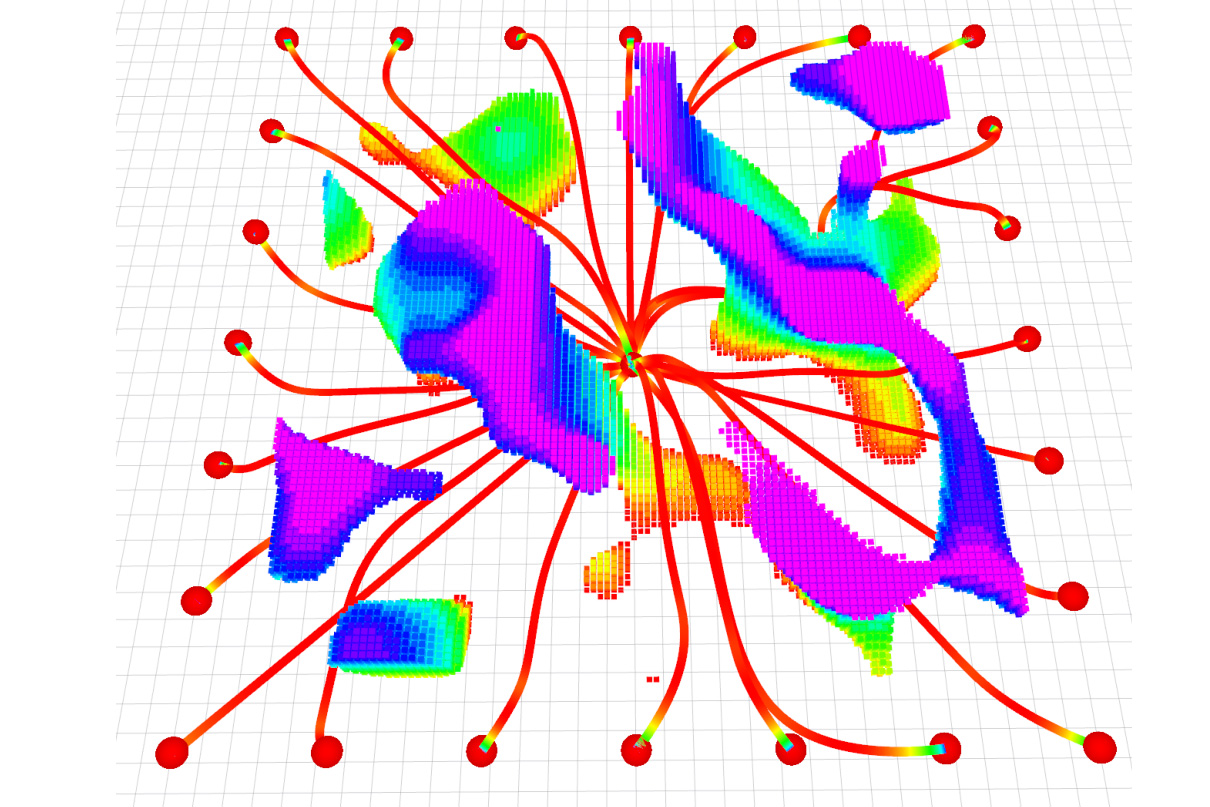
Next, Shimada ensures that his drones can predict the course of the people around it using a model called the Markov Decision Process. Instead of predicting a single trajectory per obstacle, Shimada’s module generates all possible trajectories including stopping, turning, and forward movement. After processing this information, Shimada’s drones can plan the best route to avoid collision.