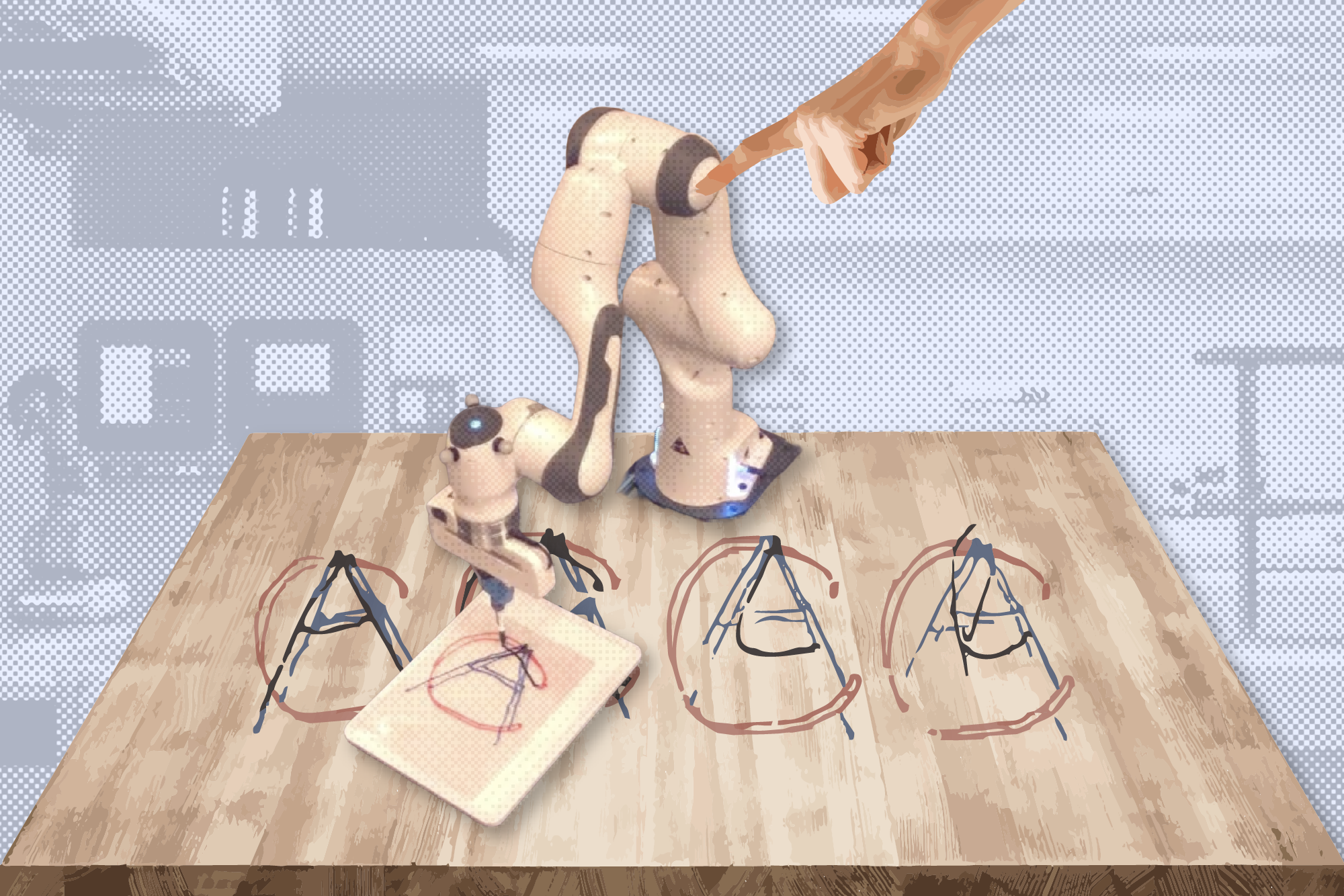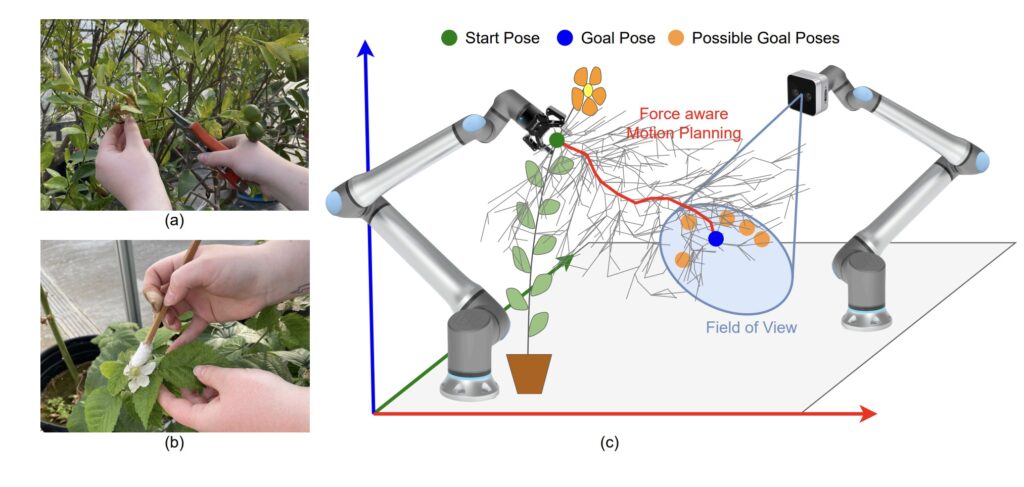
Humans often use one hand to grasp the branch for better accessibility, while the other hand is used to perform primary tasks like (a) branch pruning and (b) hand pollination of the flower. (c) An overview of the approach used by Madhav and colleagues, where one robot manipulates the branch to move the flower to the field of view of another robot by planning a force-aware path. Figure from Force Aware Branch Manipulation To Assist Agricultural Tasks.
In their paper Force Aware Branch Manipulation To Assist Agricultural Tasks, which was presented at IROS 2025, Madhav Rijal, Rashik Shrestha, Trevor Smith, and Yu Gu proposed a methodology to safely manipulate branches to aid various agricultural tasks. We interviewed Madhav to find out more.
Could you give us an overview of the problem you were addressing in the paper?
Madhav Rijal (MR): Our work is motivated by StickBug [1], a multi-armed robotic system for precision pollination in greenhouse environments. One of the main challenges StickBug faces is that many flowers are partially or fully hidden within the plant canopy, making them difficult to detect and reach directly for pollination. This challenge also arises in other agricultural tasks, such as fruit harvesting, where target fruits may be occluded by surrounding branches and foliage.